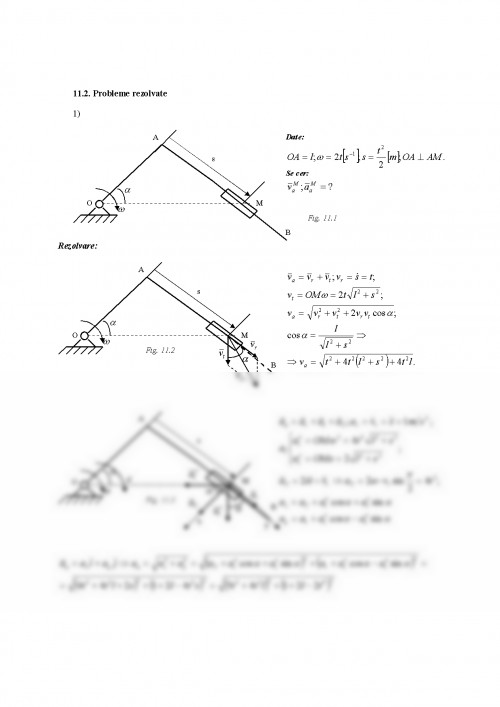
1.1. Generalitati. Definitii
Mecanica opereaza cu marimi fizice scalare si cu marimi fizice vectoriale.
Marimea fizica scalara sau scalarul este marimea fizica, care este caracterizata prin valoare
numerica absoluta sau modul.
Marimea fizica vectoriala sau vectorul este marimea fizica, care se caracterizeaza prin valoare
numerica absoluta (modul), si orientare adica directie si sens.
Marimile fizice scalare (scalarii) si marimile fizice vectoriale (vectorii) la un loc se mai numesc si marimi fizice tensoriale sau tensori.
Asadar vectorul este segmentul de dreapta orientat (fig. 1.1), cu patru elemente caracteristice: origine sau punct de aplicatie A, directie sau dreapta suport ?, sens si modul (marime, intensitate, urma) v.
Fig. 1.1: Componenta unui vector
Versorul este vectorul de modul unitar si este dat de relatia:
Definim componentele pe axele Ox, Oy si Oz ale versorului din relatia precedenta astfel:
Un vector oarecare se scrie in functie de componentele pe axe ale versorului sau astfel:
unde
sau:
1.2. Proiectia unui vector pe o axa
Proiectia unui vector pe o axa se defineste ca fiind produsul dintre vectorul respectiv si cosinusul unghiului pe care directia acestuia il face cu axa pe care se proiecteaza vectorul studiat (fig. 1.2).
1.3. Operatii cu vectori
1.3.1. Adunarea (compunerea) vectorilor
Fie vectorii:
atunci se defineste suma celor doi vectori:
Ca marime, suma celor doi vectori se scrie astfel:
unde ? este unghiul dintre cei doi vectori.
Adunarea mai multor vectori se realizeaza astfel:
1.3.1.1. Interpretare geometrica
Geometric, adunarea a doi vectori se realizeaza cu regula paralelogramului sau cu regula triunghiului (fig. 1.3).
Compunerea mai multor vectori se realizeaza, din punct de vedere geometric, cu regula poligonului (fig. 1.4).
1.3.1.2. Proprietati
a) comutativitate;
b) are element neutru (vectorul nul).
1.3.2. Scaderea (diferenta) vectorilor
Fie vectorii:
atunci se defineste diferenta celor doi vectori (fig. 1.3):
1.3.2.1. Interpretare geometrica
1.3.2.2. Proprietati
a) Element neutru: vectorul nul
1.3.3. Descompunerea unui vector dupa doua directii
Conform figurii 1.5. avem:
Pentru directii ortogonale relatia de mai sus devine (fig. 1.5.):
1.3.4. Descompunerea unui vector dupa trei directii
Din figura 1.6 avem:
unde vx, vy,vz sunt proiectiile vectorului studiat pe cele trei axe.
unde: ?, ?, ? sunt unghiurile directoare ale vectorului studiat fata de axele Ox, Oy, Oz;
cos?, cos?, cos? sunt cosinusii directori ai vectorului studiat fata de axele Ox, Oy, Oz.
Din relatia precedenta rezulta ca:
1.3.5. Produsul scalar a doi vectori
Este marimea scalara care reprezinta produsul modulelor celor doi vectori prin cosinusul unghiului dintre ei.
unde ? este unghiul dintre cei doi vectori.
Relatia precedenta este echivalenta cu relatia:
Daca:
Atunci:
De asemenea se observa ca:
1.3.5.1. Proprietati
a) Comutativitate;
b) Distributivitate fata de adunare.
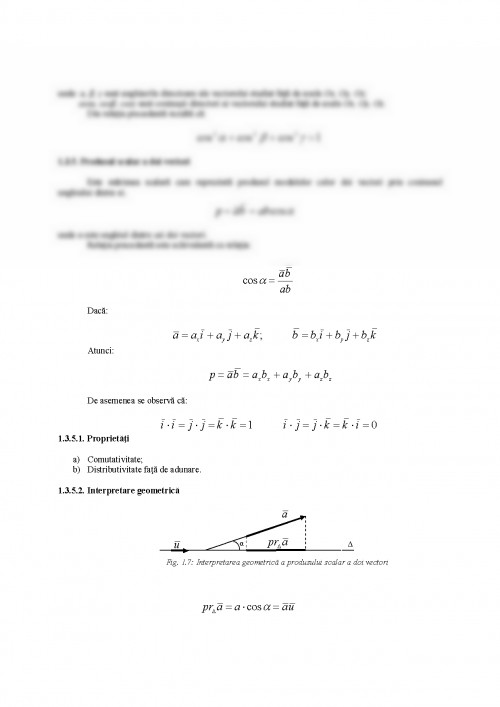
1.3.5.2. Interpretare geometrica
1.3.6. Produsul vectorial a doi vectori
Este un vector perpendicular pe planul celor doi vectori si definit ca fiind de marime egala cu produsul marimilor celor doi vectori prin sinusul unghiului dintre ei.
1.3.6.1. Proprietati
a) Anticomutativitate:
b) Distributivitate fata de adunare
c) Daca:
Atunci cei doi vectori sunt paraleli sau coliniari.
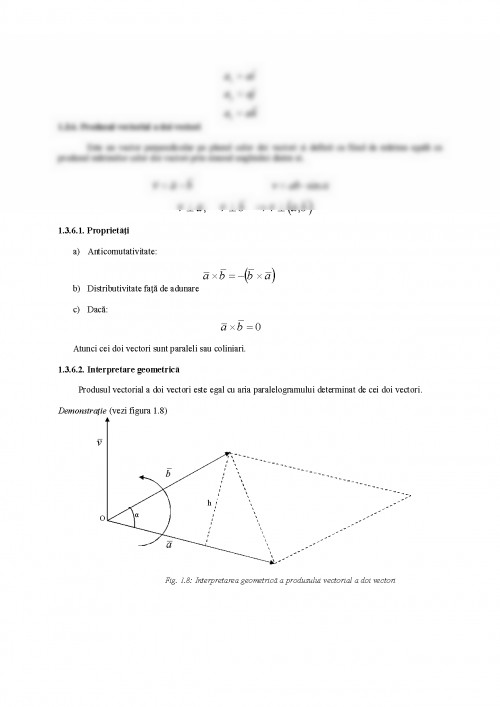
1.3.6.2. Interpretare geometrica
Produsul vectorial a doi vectori este egal cu aria paralelogramului determinat de cei doi vectori.
Demonstratie (vezi figura 1.8)
1) Ceausu V., Enescu N. - ,,Probleme de Mecanica: vol. 1 Statica si cinematica"; Editura Corifeu Bucuresti; 2002;
2) Ceausu V., Enescu N., Ceausu F. - ,,Culegere de probleme de Mecanica Statica"; Institutul Politehnic Bucuresti; 1987;
3) Ceausu V., Enescu N., Ceausu F. - ,,Culegere de probleme de Mecanica Cinematica"; Institutul Politehnic Bucuresti; 1988;
4. Dinu I. - ,,Curs Mecanica"; Universitatea ,,Politehnica" din Bucuresti; 1997;
5. Enescu N. s.a. - ,,Seminar de mecanica - Culegere de probleme"; Institutul Politehnic Bucuresti; 1990;
6. Magheti I., Voiculescu L. - ,,Elemente de mecanica aplicata"; Editura Printech Bucuresti; 2000;
7. Sarian M. s.a. - ,,Probleme de mecanica"; E.D.P. Bucuresti; 1983;
8. Staicu St., Voiculescu L. - ,,Lectii de mecanica teoretica"; Editura Bren Bucuresti; 2006;
9. Staicu St., Voiculescu L. - ,,Probleme rezolvate de statica si cinematica"; Editura Bren; Bucuresti; 2005;
10. Stroe I. s.a. - ,,Probleme de statica pentru studentii din invatamantul superior tehnic"; Editura Printech; Bucuresti; 2000;
11. Voiculescu L., Busuioceanu I., Magheti I. - ,,Mecanica: teorie si aplicatii"; Editura Bren Bucuresti; 2004.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.