PROBLEMA CINEMATICA DIRECTA
Problema cinematica directa reprezinta ansamblul relatiilor care permit definirea pozitiei endefectorului în functie de coordonatele articulare, practic ea asigurând conversia coordonatelor interne (articulare) în coordonate externe (operationale). Pozitia endefectorului este definitã prin cele „m” coordonate :
X = [ x1 , x2 , .... , xm ] (1)
Variabilele articulare sunt definite astfel :
q = [ q1 , q2 , .... , qn ]T (2)
Problema cinematica directa se exprima prin relatia :
X = f(q) (3)
iar problema cinematica inversa prin relatia :
q = f-1(X)
Existã mai multe modalitati de definire a vectorului „X” , combinând una din metodele de definire a pozitiei cu una dintre metodele de definire a orientarii.
De exemplu utilizând cosinusii directori, obtinem:
X = [Px , Py , Pz , sx ,sy , sz , nx , ny , nz , ax , ay , az]T (4)
În cele mai multe cazuri , calculul lui „X” implica calculul matricei de transformare a endefectorului.
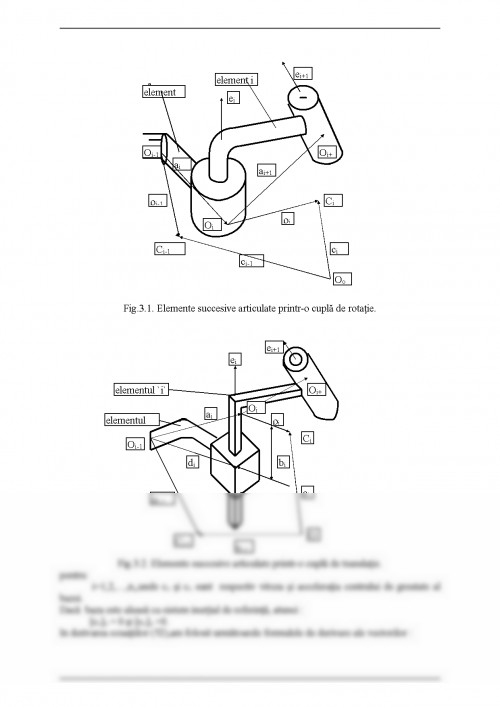
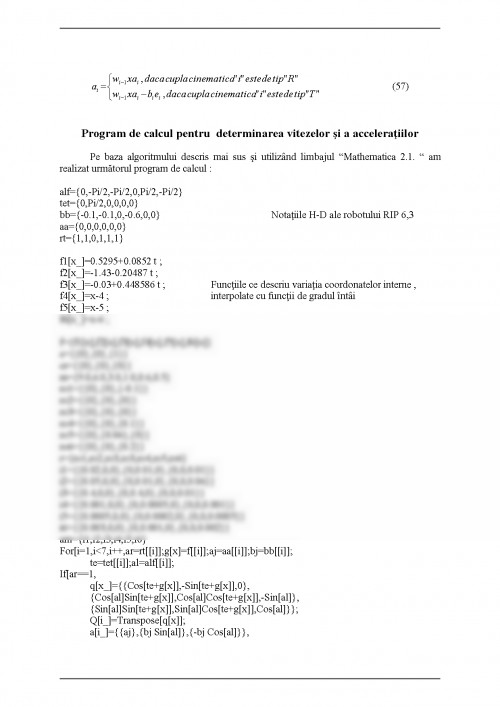
Utilizând triedrele si notatiile „Hartemberg-Denavit” , matricea de transformare a coordonatelor triedrului „i” în coordonate „i-1”, se defineste ca fiind i-1Ti
i-1Ti = (5)
Conversia coordonatelor articulare în coordonate operationale se face prin rezolvarea problemei cinematice directe iar conversia coordonatelor coordonatelor operationale în coordonate articulare se face prin rezolvarea problemei cinematice inverse.
Aplicatie la problema cinematicã directa
Fata de sistemul de coordonate fix, coordonatele unui punct, de exemplu articulatia “4” la momentul „tk” se determina rezolvând problema cinematicã directa.
Matricile de transformare omogene ale robotului PUMA 600 au forma :
0T1 =
1T2 =
2T3 =
0T3 = 0T1 1T2 2T3
= 0T3
Pentru robotul Puma relatia de mai sus devine :
= 0T3
Rezolvând sistemul ce rezulta din relatia precedenta, rezulta:
X4 = 0,432Cos2qi(t)+0,149Sinqi(t)-0,864Cos2qi(t)Sinqi(t)-0,02[Cos3qi(t)-Cosqi(t)Sinqi(t)]
Y4 = -0,149Cosqi(t)+0,432Cosqi(t)Sinqi(t)-0.864Cosqi(t)Sin2qi(t)-0,02[Cos2qi(t)Sinqi(t)-Sin3qi(t)]
Z4 = -0,432Sinqi(t)+0.04Cosqi(t)Sinqi(t)+0,432[-Cos2qi(t)+Sin2qi(t)]
Obtinem astfel coordonatele operationale (externe) în functie de cele articulare (interne), care în acelasi timp reprezinta si ecuatiile parametrice ale traiectoriei articulatiei „4”
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.