1. GPS – SISTEM DE POZITIONARE GLOBALA
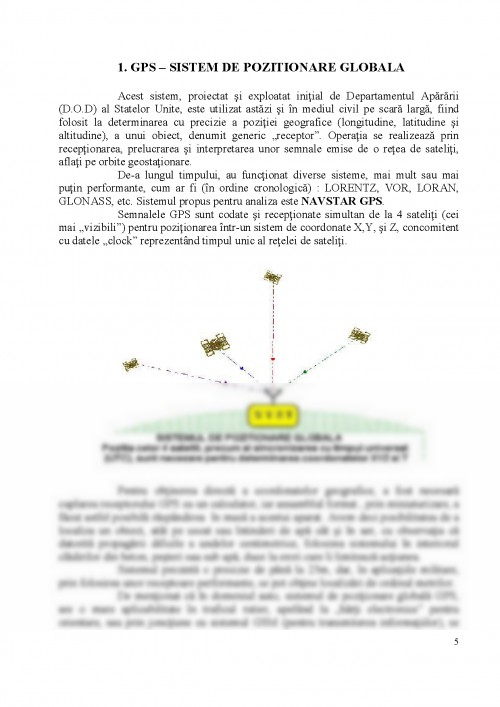
Acest sistem, proiectat şi exploatat iniţial de Departamentul Apărării (D.O.D) al Statelor Unite, este utilizat astăzi şi în mediul civil pe scară largă, fiind folosit la determinarea cu precizie a poziţiei geografice (longitudine, latitudine şi altitudine), a unui obiect, denumit generic „receptor”. Operaţia se realizează prin recepţionarea, prelucrarea şi interpretarea unor semnale emise de o reţea de sateliţi, aflaţi pe orbite geostaţionare.
De-a lungul timpului, au funcţionat diverse sisteme, mai mult sau mai puţin performante, cum ar fi (în ordine cronologică) : LORENTZ, VOR, LORAN, GLONASS, etc. Sistemul propus pentru analiza este NAVSTAR GPS.
Semnalele GPS sunt codate şi recepţionate simultan de la 4 sateliţi (cei mai „vizibili”) pentru poziţionarea într-un sistem de coordonate X,Y, şi Z, concomitent cu datele „clock” reprezentând timpul unic al reţelei de sateliţi.
Pentru obţinerea directă a coordonatelor geografice, a fost necesară cuplarea receptorului GPS cu un calculator, iar ansamblul format , prin miniaturizare, a făcut astfel posibilă răspândirea în masă a acestui aparat. Avem deci posibilitatea de a localiza un obiect, atât pe uscat sau întinderi de apă cât şi în aer, cu observaţia că datorită propagării dificile a undelor centimetrice, folosirea sistemului în interiorul clădirilor din beton, peşteri sau sub apă, duce la erori care îi limitează acţiunea.
Sistemul prezintă o precizie de până la 25m, dar, în aplicaţiile militare, prin folosirea unor receptoare performante, se pot obţine localizări de ordinul metrilor.
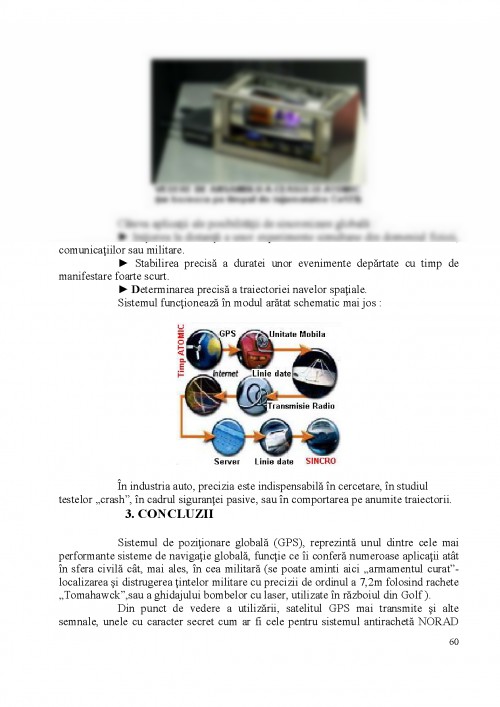
De menţionat că în domeniul auto, sistemul de poziţionare globală GPS, are o mare aplicabilitate în traficul rutier, apelând la „hărţi electronice” pentru orientare, sau prin joncţiune cu sistemul GSM (pentru transmiterea informaţiilor), se poate interveni de la distanţă în corectarea datelor privind transportul respectiv sau chiar restricţionând deplasarea în cazul când automobilul este implicat intr-un furt.
1.1. CELE 3 MODULE ALE SISTEMULUI GPS
Funcţionarea sistemului GPS este organizată pe module interconectate între ele prin linii radio de transmisii de date, lucru ce asigură atât utilizarea sistemului cât şi efectuarea corecţiilor necesare unei funcţionări precise. Aceste module sunt:
- modulul „spaţiu” – constituit din reţeaua de sateliţi;
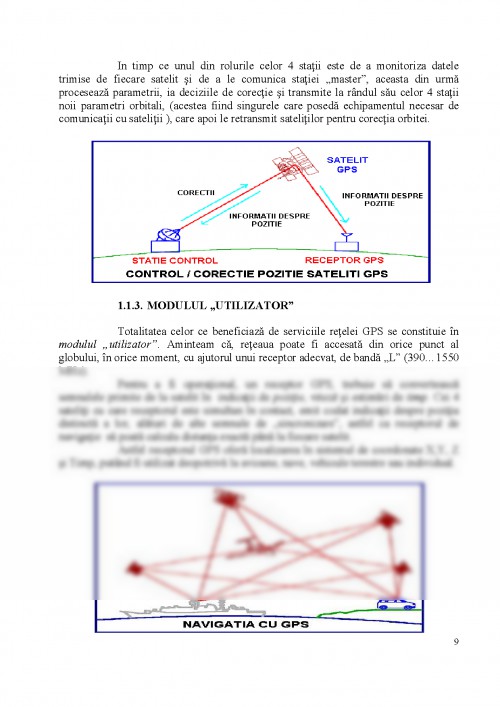
- modulul „control” – cuprinzând staţiile de sol;
- modulul „utilizator” – reprezentând fiecare beneficiar al sistemului.
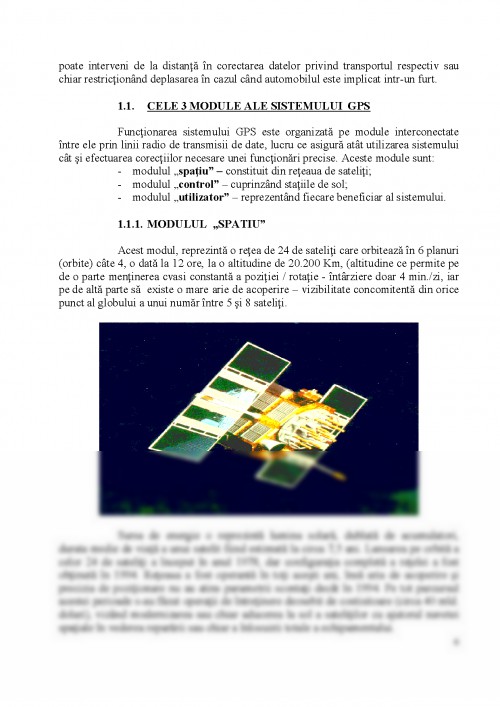
1.1.1. MODULUL „SPATIU”
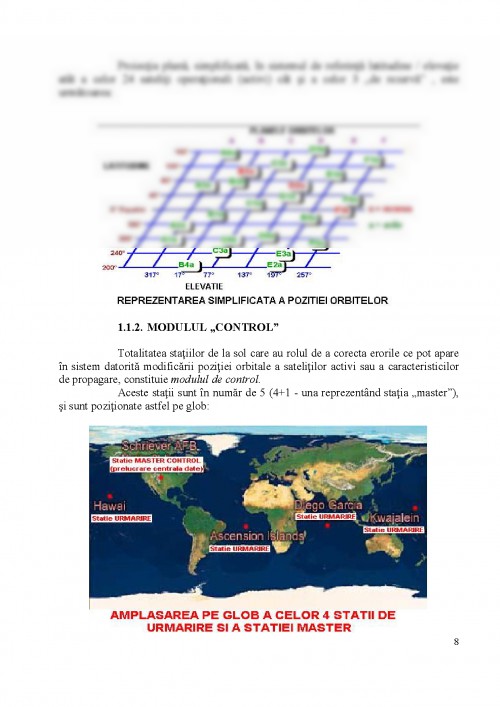
Acest modul, reprezintă o reţea de 24 de sateliţi care orbitează în 6 planuri (orbite) câte 4, o dată la 12 ore, la o altitudine de 20.200 Km, (altitudine ce permite pe de o parte menţinerea cvasi constantă a poziţiei / rotaţie - întârziere doar 4 min./zi, iar pe de altă parte să existe o mare arie de acoperire – vizibilitate concomitentă din orice punct al globului a unui număr între 5 şi 8 sateliţi.
Sursa de energie o reprezintă lumina solară, dublată de acumulatori, durata medie de viaţă a unui satelit fiind estimată la circa 7,5 ani. Lansarea pe orbită a celor 24 de sateliţi a început în anul 1978, dar configuraţia completă a reţelei a fost obţinută în 1994. Reţeaua a fost operantă în toţi aceşti ani, însă aria de acoperire şi precizia de poziţionare nu au atins parametrii scontaţi decât în 1994. Pe tot parcursul acestei perioade s-au făcut operaţii de întreţinere deosebit de costisitoare (circa 40 mld. dolari), vizând modernizarea sau chiar aducerea la sol a sateliţilor cu ajutorul navetei spaţiale în vederea reparării sau chiar a înlocuirii totale a echipamentului.
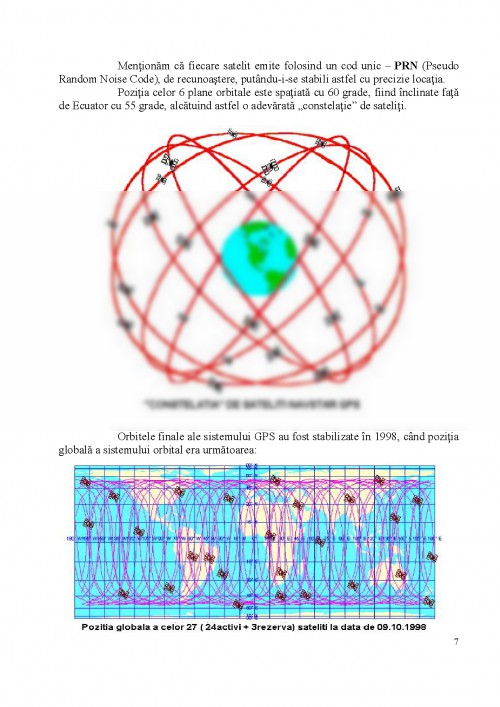
Menţionăm că fiecare satelit emite folosind un cod unic – PRN (Pseudo Random Noise Code), de recunoaştere, putându-i-se stabili astfel cu precizie locaţia.
Poziţia celor 6 plane orbitale este spaţiată cu 60 grade, fiind înclinate faţă de Ecuator cu 55 grade, alcătuind astfel o adevărată „constelaţie” de sateliţi.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.