
Introducere
Dezvoltarea unui sistem autonom pentru pulverizarea podgoriilor ar reduce cantitatea de forță de muncă necesară și ar fi redirecționat-o către îndeplinirea sarcinilor care ar putea crește randamentul exploatației, profitabilitatea agricolă și supraviețuirea economică. Localizarea, care evaluează cu precizie locația robotului, este o problemă fundamentală în domeniul robotizării mobile autonome. Pentru a permite o navigație autonomă de bază a unui robot de teren, este necesară o lege de control al planificării traseului. Acest algoritm de navigare necesită cunoașterea stării corecte a robotului la fiecare instanță (adică poziție, orientare, viteză liniară și unghiulară). Multe metode pentru senzori cu costuri reduse și estimarea stării au fost introduse de-a lungul anilor și fiecare metodă se bazează pe anumite ipoteze care nu se mențin întotdeauna în cazul robotului de câmp real. De exemplu, mulți algoritmi de estimare a stării presupun zgomotul gaussian al cititorilor de senzori. Această ipoteză nu este întotdeauna validă atunci când se ocupă cu GPS-ul, sau luând măsuri într-o perioadă scurtă de timp. Prin urmare, este necesar să se dezvolte un algoritm de estimare exactă a stării, care să se bazeze pe cât mai mulți senzori posibil și va utiliza avantajul fiecărui senzor într-un mod optim. Pentru navigare este propus un nou algoritm de fuziune a datelor, care a fuzionat optim datele de localizare de la diferiți senzori. Această lucrare începe cu dezvoltarea unui model cinematic al robotului utilizat pentru estimarea stării de model (filtrare). Se examinează modul de filtrare a datelor senzorilor și de fuziune a datelor de la toți senzorii (DGPS, IMU și viziune). Este introdus un nou pulverizator de viță de vie și noua sa structură cinetică. Metodologia pentru proiectarea unui sistem de localizare de înaltă precizie pentru fuziunea datelor senzorilor, folosind un test de probabilitate ca tehnică de luare a deciziilor pentru alegerea celei mai probabile estimări a stării. Fiecare senzor a fost pre-filtrat în funcție de distribuția acestuia. Algoritmul de localizare a fost validat folosind simularea platformei robotizate și utilizând odometru vizual bazat pe date video in timp real.
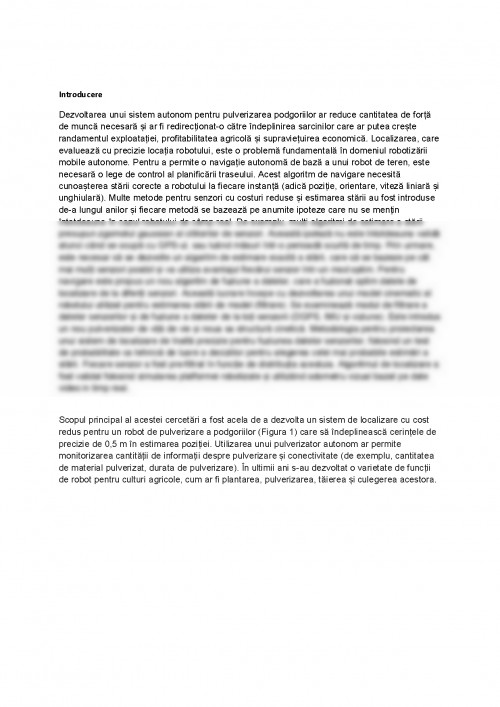
Scopul principal al acestei cercetări a fost acela de a dezvolta un sistem de localizare cu cost redus pentru un robot de pulverizare a podgoriilor (Figura 1) care să îndeplinească cerințele de precizie de 0,5 m în estimarea poziției. Utilizarea unui pulverizator autonom ar permite monitorizarea cantității de informații despre pulverizare și conectivitate (de exemplu, cantitatea de material pulverizat, durata de pulverizare). În ultimii ani s-au dezvoltat o varietate de funcții de robot pentru culturi agricole, cum ar fi plantarea, pulverizarea, tăierea și culegerea acestora.
Fig. 1 Proiectarea conceptualăa robotului pentru pulverizatorul de vie.
Cercetarea sistemelor de navigație pentru roboti mobili cu roți constă în selectarea senzorilor, cartografiere, localizare și calea de planificare. Sistemele hardware de navigație actuale pot fi împărțite în două categorii
1. Bazat pe viziune: reprezentarea mediului se face fie prin baze de date de imagini, fie prin repere vizuale. Ideea utilizării unei camere ca senzor de navigație a început acum douăzeci de ani și devine din ce în ce mai disponibilă datorită dezvoltării puterii computaționale pentru procesarea imaginilor. În 2004 a fost prezentat un calcul simplificat, folosind o cameră omnidirecțională, care a redus timpul de calcul fără a necesita o locație precisă. Acest lucru a fost posibil datorită caracteristicilor valorii normalizate RGB (roșu, verde, albastru), care a fost folosit pentru a împărți imaginea rutieră într-o regiune rutieră și o regiune dubioasă a obstacolelor și obținerea de date legate de împrejurimi prin viziune stereoscopică (Menegatti, Maeda, & Ishiguro, 2004). În 2007, NASA a prezentat o aplicație pentru osteometrie stereo vizuală (VO) pentru roverul de explorare Mars cu rezultate de simulare, concluzionând că VO este un instrument extrem de eficient pentru navigația terestră, evitarea obstacolelor și pentru creșterea siguranței conducerii. Sa constatat că principalul obstacol în calea aplicației VO a fost efortul de calcul necesar pentru procesarea imaginilor, adică a fost nevoie de o detectare mai robustă a caracteristicilor. Alte metode combinate cu senzori laser și senzori de soare pentru a îmbunătăți acuratețea VO și pentru a reduce sensibilitatea la lumină (McManus, Furgale, Stenning, & Barfoot, 2013). Cercetările lor concluzionează că astfel de tehnici îmbunătățesc rezultatele prin adăugarea și integrarea senzorului laser cu VO. Cu toate acestea, prețul senzorilor solare este de circa 10.000 USD, ceea ce face imposibilă utilizarea în scopuri agricole.
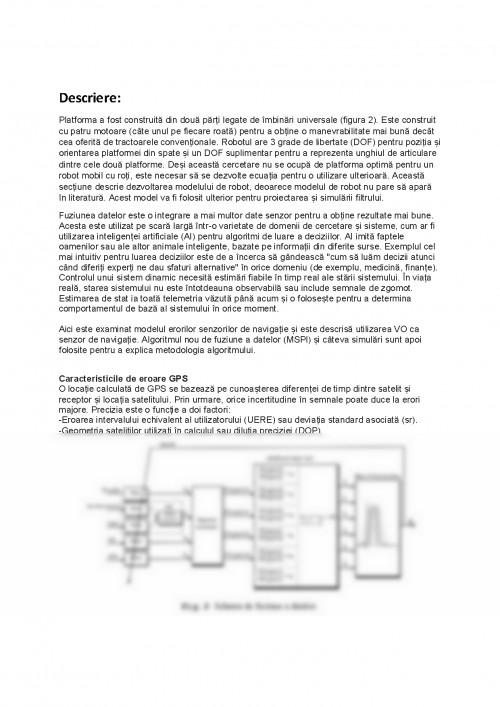
2.Bazat pe non-vision: Tehnicile de navigație non-vision variază și se bazează în general pe fuziunea datelor cu mai multe senzori. Senzorii obișnuiți sunt accelerometrele, giroscoapele, sistemul de poziționare globală (GPS), sonarul, senzorii de proximitate laser etc. Întrebarea despre ce senzor să aleagă, precum și cum să combinăm optim datele pentru o estimare precisă este o problemă interesantă de cercetare discutată în multe re-căutări până în prezent. Astfel de algoritmi trebuie să depășească zgomotul senzorilor și incertitudinile și să aleagă cea mai bună opțiune folosind tehnicile de luare a deciziilor. În Sukkarieh (2000), este prezentată dezvoltarea teoretică și practică a unui sistem de navigație inerțial, cu costuri reduse, de înaltă integritate, pentru utilizarea în aplicațiile autovehiculelor terestre autonome, cu modele de erori de drift asociate cu navigația inerțială. Sistemul a fost bazat pe sistemul de navigație globală sat-elită, fuzionat cu senzori de navigație inerțiali pentru detectarea preciziei și a erorilor. Fuziunea datelor implementată în această cercetare se bazează pe filtrarea Kalman, presupunând distribuții Gauss și nu acoperă scenarii non-Gaussian care se referă în mod normal la erorile GPS. Principala problemă a fost lipsa de redundanță în senzori și un timp de instalare lung. De asemenea, senzorii utilizați în acest proiect sunt încă destul de costisitori pentru aplicațiile agricole. Un exemplu de performanță mai bună a filtrelor este descris în Simon (2006). În Claraco (2009), este prezentată o abordare a localizării și cartografiei simultane (SLAM) pe baza unei estimări metrice-topologice hibride.
Carpenter, J., Clifford, P., & Fearnhead, P. (1999). Improved particle filter for nonlinear problems. IEE Proceedings e Radar, Sonar and Navigation, 146(1), 2e7.
Claraco, J. L. B. (2009). Contributions to localization, mapping and navigation in mobile robotics. Ph.D. thesis. Spain: University of Malaga.
Engineering Geology Group. (2001). In R. Throner (Ed.), Engineering geology field manual (Vol. 2, p. 446). Washington DC: U.S: Department of the Interior.
Ferguson, D. (2010). Path generation and control for end of row turning in an orchard environment. Master thesis, Ch.2. Pittsburgh: Carnegie-mellon robotics institute.
Forsyth, D. A., & Ponce, J. (2011). Computer vision: A modern
approach (2nd ed.). Cambridge: Pearson.
Fox, D., Burgard, W., & Thrun, S. (1999). Markov localization for mobile robots. Journal of Artificial Intelligence Research, 11, 391e427.
IEEE Std 952™. (1998). IEEE standard specification format guide and test procedure for Single-Axis interferometric fiber optic gyros. New York: IEEE.
ISO 22866. (2005). International Standard. Equipment for crop protection. Methods for field measurement of spray drift. Ch. 3. s.l.: ISO.org.
Jiang, R., Klette, R., & Wang, S. (2010). Statistical modeling of long-range drift in visual odometry. In Computer vision e ACCV 2010 Workshops (Vol. 6469, pp. 214e224).
Lambert, A., Furgale, P., Barfoot, T. D., & Enright, J. (2012). Field testing of visual odometry aided by a sun sensor and inclinometer. Journal of Field Robotics, 29(3), 426e444.
Liu, S. J., & Chen, R. (1998). Sequential Monte Carlo methods for dynamical systems. Journal of the American Statzstical Association, 93, 1032e1044.
McManus, C., Furgale, P., Stenning, B., & Barfoot, T. D. (2013). Lighting-invariant visual teach and repeat using appearance-based lidar. Journal of Field Robotics, 30(2), 254e287.
Menegatti, E., Maeda, T., & Ishiguro, H. (2004). Image-based memory for robot navigation using properties of omnidirectional images. Robotics and Autonomous Systems, 47(4), 251e267.
Moravec, H. (1980). Obstacle avoidance and navigation in the real world by a seeing robot rover. Stanford: Stanford University.
NOAA. (2013). Global positioning e Survey manual. s.l.: US Department of Commerce.
Ristic, B., Arulampalam, S., & Gordon, N. (2004). Beyond the Kalman Filter: Particle filters for tracking applications. Norwell, Massachusetts: Artech House.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.