Introducere
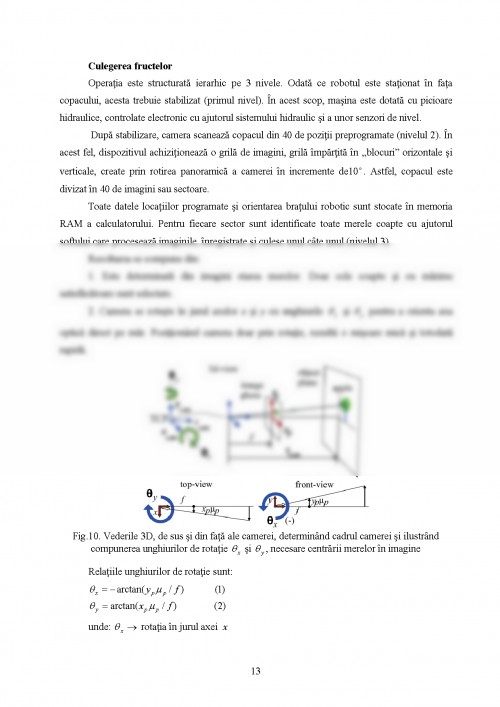
SUA şi Uniunea Europeană se confruntă cu un mare deficit de forţă de muncă în agricultură unde ponderea o are munca la negru şi imigranţii ilegali. Cum graniţele sunt tot mai bine controlate şi securizate iar forţa de muncă ieftină tot mai puţină, mulţi fermieri caută soluţii în tehnologia roboţilor.
Robotica – o ramură modernă şi avansată a ştiinţei calculatoarelor, are un rol important în domeniul agriculturii. În termeni generali, robotul este un dispozitiv care poate fi programat pentru manipularea diverselor obiecte şi pentru realizarea anumitor munci.
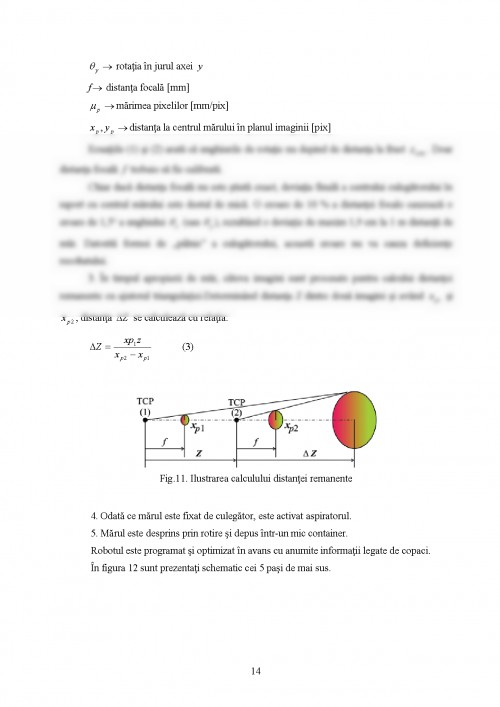
Dacă la început au fost dezvoltaţi roboţi industriali pentru a prelua şi îmbunătăţii anumite activităţi din fabrici, în momentul de faţă, cercetătorii japonezi mai ales, încearcă să construiască roboţi care pot fi utilizaţi în agricultură, ferme şi munci forestiere.
Roboţii utilizaţi în agricultură (Agroroboţii) pot îndeplini următoarele activităţi: aratul, săpatul, îndepărtarea buruienilor, recoltatul, culesul fructelor şi legumelor, tunderea oilor etc. Sunt şi roboţi folosiţi la sortarea fructelor după culoare şi mărime.
În cele ce urmează sunt prezentate cîteva soluţii constructive de roboţi utilizaţi în agricultură, destinaţi să înlocuiască munca oamenilor şi să crească productivitatea.
1. Robot întrebuinţat la îndepărtarera buruienilor din culturile agricole
Un sistem robotizat este cel prezentat în figura 1. Acesta este destinat îndepărtării buruienilor din culturile agricole.
Fig.1 Schema bloc a unui robot folosit la îndepartarea buruienilor
Sistemul este compus dinr-o platformă pe care sunt montate camere video, GPS (Global Positioning System), surse de lumină pentru a spori performanţele algoritmilor de vizualizare, partea de senzorică, actuatori, codificator etc.
Pe platformă sunt montate motoare electrice pentru acţionarea robotului şi o unealtă folosită la îndepărtarea buruienilor. Robotul este prevăzut cu baterii. Cînd acesta se află în starea de repaus, bateriile se pot reîncărca la o sursa de alimentare.
În interiorul mecanismului de control se află un calculator în care e stocat programul care permite:
- găsirea unui rând sau oricărui alt loc din câmp;
- urmărirea rândului şi îndeplinirea sarcinilor (îndepărtarea buruienilor);
- face deosebirea între o plantă cultivată şi buruieni;
- evitarea obstacolelor;
- identificarea începutului şi sfârşitului de rând şi schimbarea direcţiei (trecerea la următorul rând).
Camera din faţă este o cameră stereo care foloseşte algoritmi pentru măsurarea distanţei, pentru evitarea obstacolelor şi pentru detecţia rândurilor cultivate. După cum se observă în figură mai avem încă două camere orientate către sol, una în faţa şi cealaltă în spatele uneltei folosite la îndepartarea buruienilor. Acestea sunt utilizate pentru detecţia culturilor şi pentru navigaţie. Această combinaţie face posibilă distincţia dintre o buruiană şi o cultură bună.
Un senzor GPS este montat deasupra robotului, această configuraţie permiţând recepţia semnalelor prin satelit. Acesta este folosit pentru orientare, robotul ştiind astfel de unde să înceapă sau cât de mare este locul cultivat.
Senzorul de deplasare (de direcţie, de compas) furnizează direcţia absolută spre nord. Sunt două tipuri de senzori de direcţie: magnetici şi giroscopici.
Senzorul de direcţie magnetic măsoară cîmpul magnetic al Pământului şi extrage componenta orizontală pentru a furniza direcţia polului nord magnetic. Dezavantajul acestui tip este rezoluţia scăzută la latitudini ridicate.
Senzorul de direcţie giroscopic este compus dintr-un giroscop care, sub influenţa gravitaţiei şi rotaţiei Pământului furnizează direcţia reală nord. Dezavantajul este acela că sunt sensibili la vibraţii, sunt mari şi scumpi. Din acest motiv nu sunt utilizaţi de obicei la roboţii mobili.
Codificatorul este montat pe roţi. Are rolul de a converti rotaţia roţilor în impulsuri (practic de a transforma mişcarea circulară într-una liniară). Este un senzor ieftin şi simplu care furnizează o poziţionare bună sub ipoteza că forma roţii este uniformă.
Senzorul de vizualizare este principalul senzor din sistem. Este un senzor foarte puternic, o mulţime de informaţii putând fi extrase cu ajutorul imaginilor. Sistemul hardware este destul de simplu. Este compus dintr-un sistem de achiziţie, cameră video şi calculator.
Motorul electric este utilizat pentru acţionarea roţilor. Acesta va controla viteza cu ajutorul unei bucle interne de curent. Această buclă controlează cuplul motorului.
Unealta pentru îndepărtarea buruienilor este acţionată tot de un motor electric. Este o sculă simplă: un disc rotativ cu spirale. Aceasta smulge sau taie rădăcina buruienilor, rămăşiţele fiind lăsate să se usuce pe sol.
Sursele de lumină sunt montate sub robot pentru iluminarea pământului, camera prelevând astfel imagini mult mai clare.
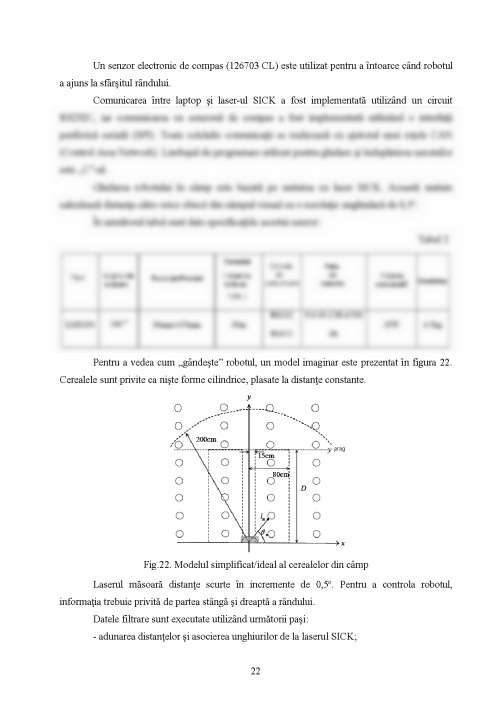
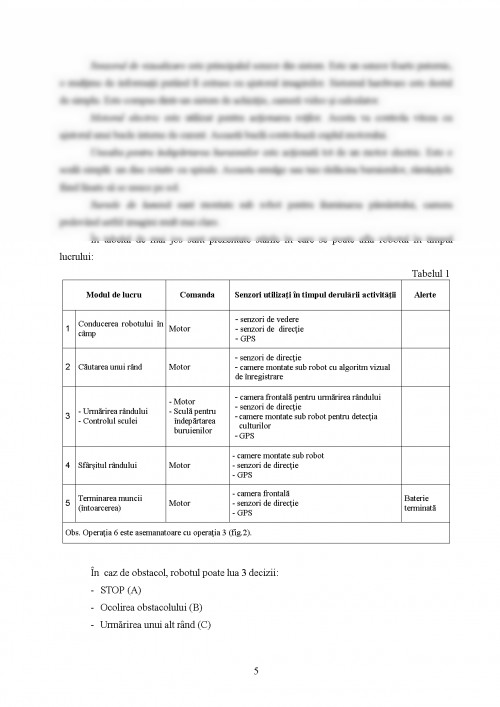
În tabelul de mai jos sunt prezentate stările în care se poate afla robotul în timpul lucrului:
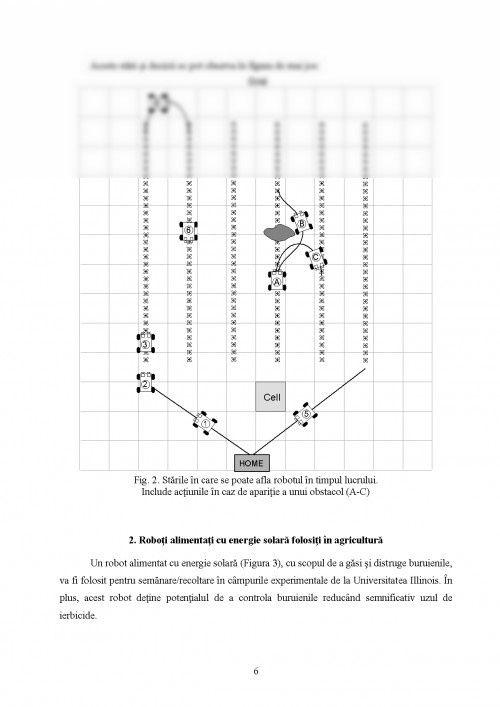
Referatul a fost prezentat in cadrul Universitatii "Transilvania" Brasov, Facultatea de Inginerie Mecanica, Specializarea Inginerie Mecatronica. In acest referat sunt descrise cateva tipuri constructive de roboti utilizati in agricultura.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.