1 Introducere
1.1 Precizia Servomotoarelor
Sisteme de poziționare necesare pentru multe aplicații de înaltă tehnologie trebuie să îndeplinească o cerere tot mai mare de înaltă rezoluție și acuratețe, timp de răspuns rapid, precum și accelerarea înaltă și viteză mare. Servomotoarele de precizie sunt folosite în prezent în aplicații care necesită o rezoluție și acuratețe în gama submicronică, în viitorul apropiat, această cerință va fi în intervalul de sub-nanometri. În ceea ce privește, motoare liniare de precizie s-au îmbunătățit în precizia poziției de la zeci de micrometri, în al 1920-1930 la zeci de nanometri în a 1980-1990. La începutul secolului 21, precizia poziției de motoare liniare este de așteptat să fie mai mică de 1 nm.
Micromotoarele de c.a sau de c.c. și motoarele pas cu pas sunt frecvent utilizate pentru sarcini de poziționare simple care nu necesită precizie și înaltă rezoluție. Motoarele rotative electromagnetice sunt ușor disponibile în aproape orice dimensiune de la un watt la cîteva sute de kilowați ori mai mult. Pentru a converti miscare de rotatie în mișcare liniara sau pentru a crește rezoluția pentru sisteme de înaltă precizie de acționare, diferite tipuri de transmisii pot fi utilizate. O modalitate posibilă de a realiza o pozitionare precisa pe o rază lungă de mișcare ar fi să se utilizeze un motor de curent continuu, urmată de o unitate cu bile, care este atașat la un ghidaj liniar. Pentru poziționare normală și de precizie, aceste servomotoare sunt, în general, de preferat, din cauza rigidității lor ridicate, forță mare de ieșire, cu rază lungă, și cost redus. Rezoluția și precizia acestora sunt de obicei limitate de rezoluția unităților motoare, care sunt utilizate pentru a le conduce, jocul între șurubul și unitatea de filetat cît și de nelinearitățile forțelor de frecare, cum ar fi fenomenul de alunecare. Pentru acuratețe puțin mai bună, se pot folosi unități cu șurub de performanță și elemente de acționare hidraulice, care au fost dezvoltate cu precizie de sub-microni și rezoluție de ordinul nanometrilor. Pentru precizie sub-nanometri și rezoluție înaltă, au fost dezvoltate dispozitive folosind materiale piezoelectrice.
Pentru aplicații care necesită o gamă de mișcare pe ordinea de 10 µm, sistemul de acționare este realizat din materiale active, cum ar fi materiale piezoelectrice. Poziționarea obiectului de interes se realizează prin deformarea materialului activ, care este liniar dependent de o tensiune aplicată. De aceea, deplasarea are o rezolutie maxima în infinit (teoretic). Rezoluția este limitată mai mult de dispozitivul care furnizează semnalul, cum ar fi un sistem de control sau de un amplificator, decât de histerezisul materialului în sine. Avantaje ale sistemelor astfel concepute includ folosirea materialelor de înaltă rigiditate, rezistență ridicată, și dimensiuni mici.
O tehnica pentru a realiza cu rază lungă de mișcare și de a folosi în continuare avantajele materialelor active, necesită o structură cu servomotoare multiple. Acest design este centrat în jurul unui singur element piezoelectric de extensie care are o serie de elemente piezoelectrice de prindere la fiecare capăt. Cele trei elemente lucrează împreună pentru a muta centrul de tija. Colierele acționează ca frane de prindere care alternativ eliberează tija în timp ce elementul de extensie mișcă tija. Prin sincronizarea corectă este realizată extinderea elementelor de prindere și de mișcare liniară. Cu toate acestea, deoarece desenul sau modelul folosește un element de prelungire unică, propunerea trebuie să insiste în timpul retragere a elementului de prelungire. Aceasta produce oprirea mișcării de translație caracteristică motoarelor de tip inchworm.
1.2 Motoare piezoelectrice cu ultrasunete
Dezvoltarea motoarelor cu ultrasunete a condus la un tip de actuator nou, care are multe proprietăți atractive pentru sarcini de poziționare de precizie. Motoarele cu ultrasunete folosesc vibratii mecanice pentru a produce o frecare ciclică bazată pe forță motrice între o componentă în mișcare și una staționară. Spre deosebire de motoarele electromagnetice, motoarele cu ultrasunete generează un câmp electromagnetic nu mai mare decât un condensator. Ele funcționează cu câmpuri electrice, ceea ce înseamnă că acestea pot fi utilizate în medii în care câmpurile electromagnetice nu sunt permise. Motorul cu ultrasunete poate fi folosit direct pentru poziționare precisă fără a fi nevoie de unelte sau transmisii de alte unități liniare sau rotative.
Deoarece procesul de conducere se bazează pe frecare, motoarele cu ultrasunete mențin în mod automat poziția lor atunci când sursa de alimentare este oprită. Pe de altă parte, uzura asociată la piesa de contact de frecare poate creea probleme. Dezavantajul major al acestei tehnologii este puterea necesară pentru a genera vibrații de înaltă frecvență. Pentru majoritatea modelelor este necesară o sursă de înaltă frecvență pentru a conduce vehiculul cu motor. Pentru ca amplificatorul putere să fie eficient, trebuie să fie proiectat pentru a se potrivi condițiilor de exploatare și proprietățile electrice ale motorului. Natura materialelor active utilizate pentru a construi acționarea în combinație cu necesitatea de a opera la frecvențe mai mari de limita de 20kHz, dimensiunea motorului, fac dificilă proiectarea unor amplificatoare eficiente.
Motoarele cu ultrasunete pote fi folosite pentru aplicaţii de poziționare, care necesită acționari de cursă mică, dar cu rezoluție înaltă. Acestea sunt motoare de acționare adecvate pentru roboți, dispozitive miniaturizate în special, precum și actuatori pentru utilizarea în bunuri de consum și echipamente aerospațiale, cum ar fi lentilele aparatului foto. Canon a introdus prima lentilă auto-focus la aparat de fotografiat care utilizează un motor cu ultrasunete in1987. În funcție de design specific, motoarele cu ultrasunete au viteze de până la 1m/s (cu potențialul de a fi chiar mai rapid) și o rezoluție mai jos 1μm.
Discutarea procesului de conducere impune ca motoarele să fie clasificate în două tipuri principale: motoare cu undă progresivă și motoare cu undă permanentă (staţionară). Atât procesul prin care motoarele cu ultrasunete generează ghidaje de mișcare și procesul prin care se deplasează undele sau stationează undele, procesele sunt realizate în mod diferit pentru fiecare tip de motor. Diferențierea în continuare, de către un fel de modul de vibrație, ordinea de moduri de rezonanță, forma de acționare, materiale active, direcția de mișcare generată (liniară, rotativă) impun mai multe detalii specifice ale design-ului individual decât principiul de funcționare.
1.2.1 Motoare piezoelectrice cu undă progresivă
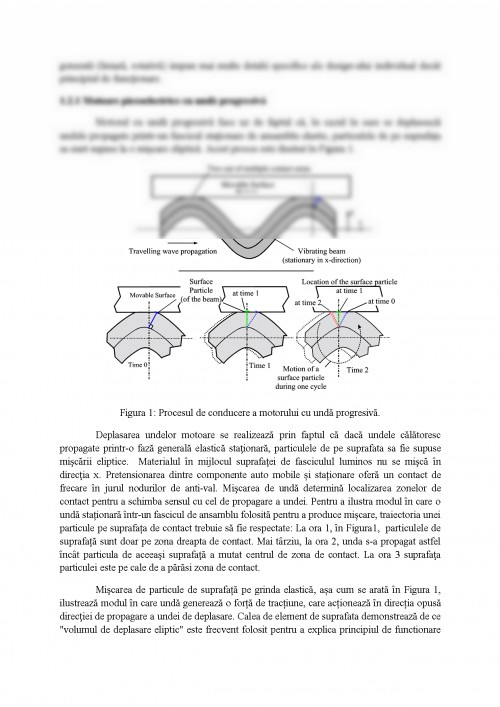
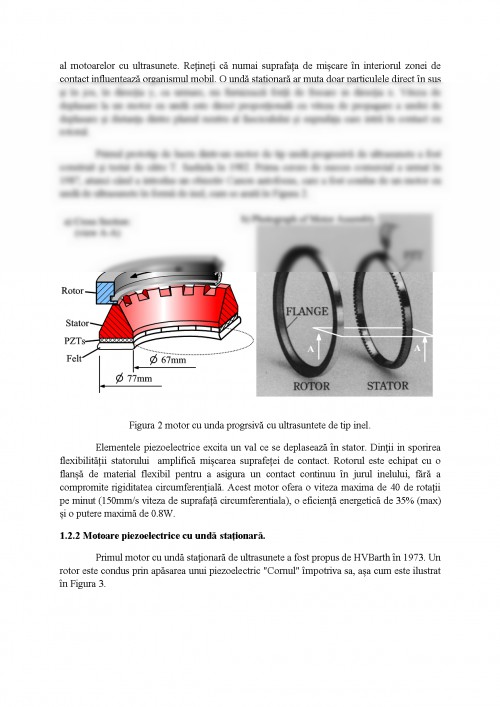
Motorul cu undă progresivă face uz de faptul că, în cazul în care se deplasează undele propagate printr-un fascicul staționare de ansamblu elastic, particulele de pe suprafața sa sunt supuse la o mișcare eliptică. Acest proces este ilustrat în Figura 1.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.