
Structural, un sistem hidraulic automat reprezinta o succesiune de conversii de energie C1, C2 si C3, figura 1.1. In figura, blocurile reprezinta in ordine: motorul electric de actionare MEA, generatorul hidrostatic de presiune si debit GH, aparatura de reglare si control ARC (aparatura directionala, de reglare a debitului si presiunii, de inmagazinare, de filtrare etc.); motorul hidraulic MH si mecanismul de executie ME (organul de lucru).
Motorul electric transforma energia electrica in energie mecanica, deci, la nivelul sau, se realizeaza prima conversie C1, apoi, generatorul hidrostatic transforma energia mecanica in energie potentiala de presiune, realizand astfel cea de a doua conversie C2, energie care - preluata de elementele de reglare si control - este transformata in mod convenabil in concordanta cu programul de functionare al instalatiei si transmisa apoi motorului hidraulic. La nivelul motorului hidraulic (circular sau liniar), se realizeaza ultima conversie de energie C3, din energie hidraulica in energie mecanica, transmisa apoi organului activ al sistemului de actionare.
Spre deosebire de sistemele hidraulice automate in acceptiune clasica, avand o marime de intrare xi si o marime de iesire xe (figura 1.2), sistemul hidraulic automat din figura 1.1 este prezentat in acceptiune sistemica, ca un sistem multivariabil, in care elementele componente (blocurile 1 5) sunt cuadripoli sau sexapoli, iar liniile de conexiune (polii) reprezinta suportul de informatie a variabilelor.
Sistemul de actionare global presupune existenta unei marimi electrice (U,I), mecanice (n1; n2(v); n(v); M1; M2(F); M(F)) si hidraulice (Qp; QM; pP; pM), ordonate intr-un anumit fel in concordanta cu modul de transmitere a energiei sau informatiei. Marimile U, n1, QP, QM, n2(v) si n(v) sunt denumite variabile directe sau de miscare, prin intermediul acestora realizandu-se caracteristica de frecventa a sistemului, iar marimile M(F), M2(F), pM, pP, M1, I - variabile de efort, ceea ce presupune rezerva de putere a sistemului pentru crearea fortei sau momentului necesar invingerii fortelor sau momentelor rezistente la organul de lucru.
Marimile x si F' sunt marimi exterioare de comanda.
In cele ce urmeaza, vom prezenta metodica cercetarii teoretice prin modelare si simulare pe calculatorul numeric a elementelor componente ale sistemelor hidraulice automate, cum ar fi de exemplu: generatoare de energie (pompe), motoare, aparatura de reglare a debitelor si presiunilor, aparatura de distributie etc
1.1. MODELUL POMPEI CU DEBIT CONSTANT
Pentru elaborarea modelelor matematice si intocmirea schemelor bloc functionale, cat si pentru simularea numerica pe calculator, se pleaca de la ecuatia de echilibru a debitelor si miscarii si, respectiv, de la ecuatia de echilibru dinamic a momentelor la nivelul legaturii prin cuplaj dintre motorul electric de antrenare si generator, care, pentru pompele cu debit constant (PDC), au urmatoarea forma:
(1.1)
(1.2)
unde: QP este debitul pompei [m3/s]; qP- capacitatea pompei (se neglijeaza valorile neactive de lichid) [m3]; - P - viteza unghiulara a pompei [rad/s]; aP - gradientul linearizat al pierderilor de debit [(m3/s)/(N/m2)]; p - presiunea instantanee din pompa [N/m2]; E - modulul de elasticitate al lichidului [N/m2]; J - momentul de inertie cumulat al motorului pompei, cuplajului si rotorului motorului electric [Nms2]; bP - gradientul linearizat al pierderilor proportionale cu turatia [(Nm) /(rad/s)]; Ke - panta caracteristicii mecanice a motorului electric [(Nm) /(rad/s)]; - P - viteza unghiulara de sincronism a motorului electric [rad/s]; cfP - coeficientul de frecare uscata (marime adimensionala).
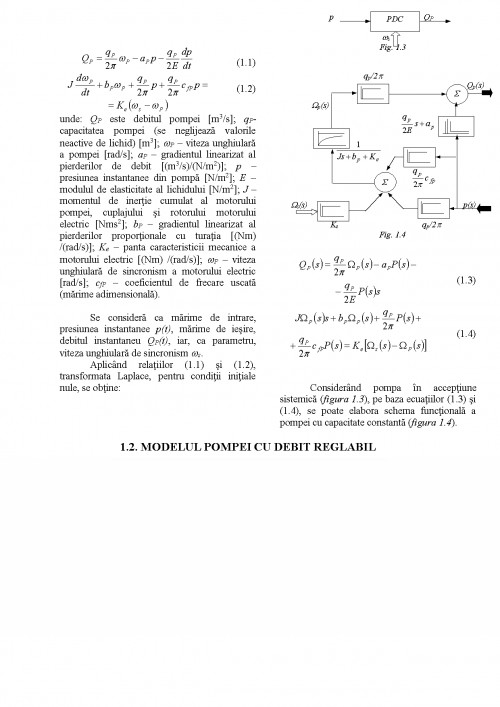
Se considera ca marime de intrare, presiunea instantanee p(t), marime de iesire, debitul instantaneu QP(t), iar, ca parametru, viteza unghiulara de sincronism - s.
Aplicand relatiilor (1.1) si (1.2), transformata Laplace, pentru conditii initiale nule, se obtine:
(1.3)
(1.4)
Considerand pompa in acceptiune sistemica (figura 1.3), pe baza ecuatiilor (1.3) si (1.4), se poate elabora schema functionala a pompei cu capacitate constanta (figura 1.4).
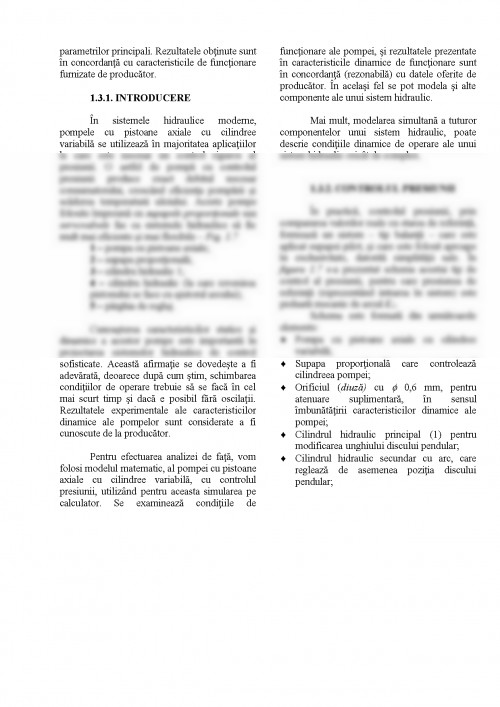
1.2. MODELUL POMPEI CU DEBIT REGLABIL
1. OPPELT W. Tehnica reglarii automate
New Jersey 1961
2. GILLE J.G.
Teoria si calculul sistemelor de reglare automate
Ed. Tehnica, Bucuresti 1966
3. MAZILU I.
VIRGIL L.
DIMA P.
Sisteme hidraulice automate
Ed. Tehnica, Bucuresti 1987
4. VIRGIL M.
ALEXANDRU M. Sisteme hidraulice automate
Ed. Tehnica, Bucuresti 1987
5. MERIN V.
MASCOVICI R.
TENESLAV D.
Sisteme hidraulice de actionare si reglare automata
Ed. Tehnica, Bucuresti 1981
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.