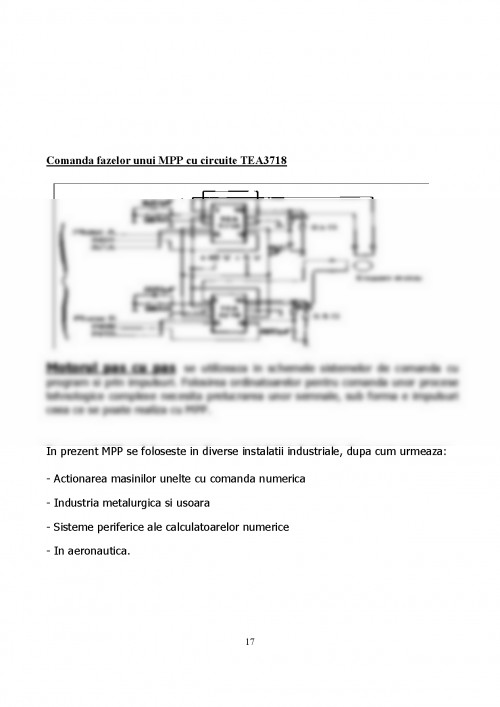

Motorul pas cu pas sau M.P.P. este un convertor electromecanic care realizeaza transformarea unui tren de impulsuri digitale intr-o miscare proportionala a axului sau.
MPP mai prezinta proprietatea de a putea intra in sincronism fata de impulsurile de comanda chiar din stare de repaus, functionand fara alunecare iar franarea se efectueaza, de asemenea, fara iesirea din sincronism.
Datorita acestui fapt se asigura porniri, opriri si reversari bruste fara pierderi de pasi pe tot domeniul de lucru.
Viteza unui MPP poate fi reglata in limite largi prin modificarea frecventei impulsurilor de intrare.
Utilizarea MPP confera urmatoarele avantaje:
asigura univocitatea conversiei numar de impulsuri in deplasare si ca urmare pot fi utilizate in circuit deschis;
gama larga a frecventelor de comanda;
precizie de pozitionare si rezolutie mare;
permit porniri, opriri, reversari fara pierderi de pasi;
memoreaza pozitia;
sunt compatibile cu comanda numerica.
Principalele dezavantaje ale utilizarii MPP sunt:
unghi de pas, deci increment de rotatie, de valoare fixa pentru un motor dat;
viteza de rotatie relativ scazuta;
putere dezvoltata la arbore de valoare redusa;
randament energetic scazut;
D.p.d.v. al constructiei circuitului magnetic sunt :
MPP cu reluctanta variabila (de tip reactiv);
MPP cu magnet permanent (de tip activ);
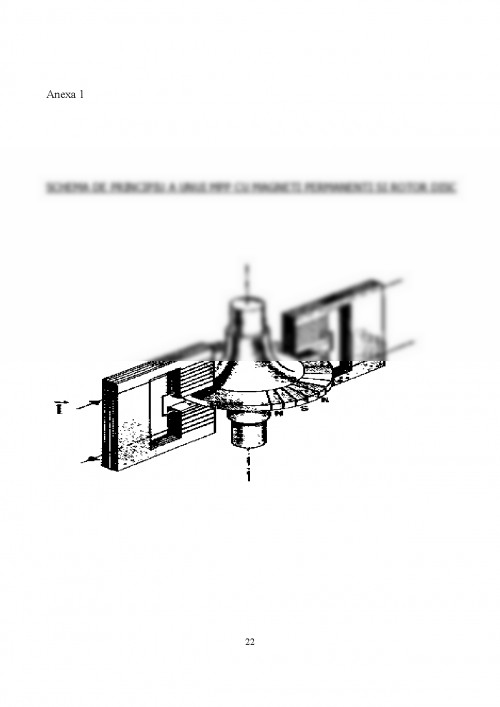
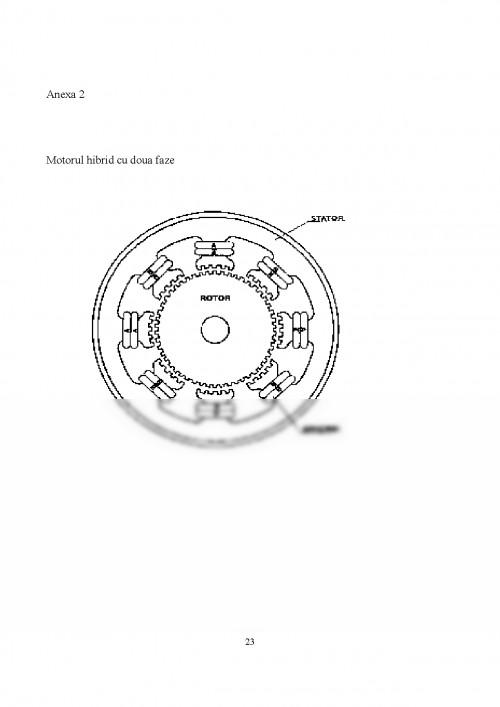
MPP hibride.
Utilizari
Lucrarea este structurata in trei capitole:
Cap.I prezinta MPP
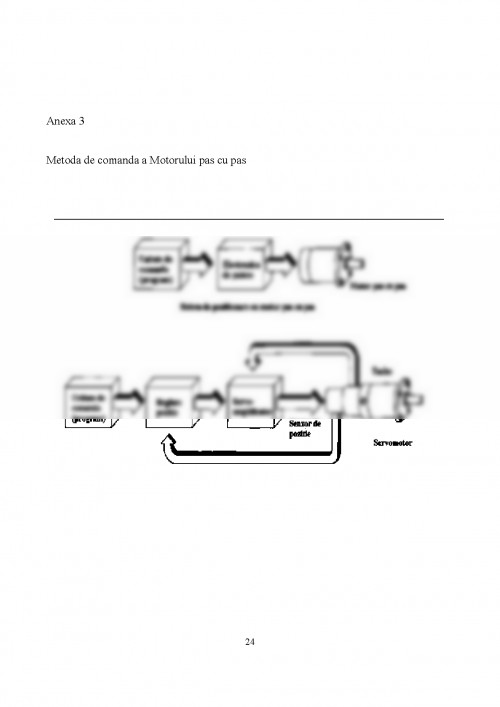
Cap.II prezinta metodele de comanda
Cap.III Sanatatea si securitatea muncii
Cap I Motorul pas cu pas
Motorul pas cu pas sau M.P.P. este un convertor electromecanic care realizeaza transformarea unui tren de impulsuri digitale intr-o miscare proportionala a axului sau.
Miscarea rotorului MPP consta din deplasari unghiulare discrete, succesive, de marimi egale si care reprezinta pasii motorului.
Numarul pasilor efectuati trebuie sa corespunda cu numarul impulsurilor de comanda aplicate fazelor motorului. Deplasarea unghiulara totala, constituita dintr-un numar de pasi egal cu numarul de impulsuri de comanda aplicat pe fazele motorului, determina pozitia finala a rotorului.
Kiyonobu Mizutani, Shigero Hayashi, Nobouky Matsui -"Modeling and Control of Hybrid Stepping Motor", IEEE /IAS Annual Meeting, 1993, pp. 289-294;
Trifa V., "Servomecanisme", Litografia Institutul Politehnic din Cluj-Napoca, 1981;
Viorel I.A., Szabo L., "Hybrid linear stepper motors", Ed. Mediamira, Cluj- Napoca, 1998.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.