Introducere
Primul capitol prezinta o sinteza privind stadiul la zi al realizarilor in domeniul robotilor mobili si precizeaza directiile principale de cercetare in domeniu.
Robotul mobil este un sistem complex care poate efectua diferite activitati intr-o varietate de situatii specifice lumii reale. El este o combinatie de dispozitive echipate cu servomotoare si senzori care trebuie sa planifice miscarile astfel incat robotul sa poata realiza o sarcina in functie de starea initiala a sistemului si in functie de informatia existenta,legata de mediul de lucru.
In zilele noastre robotii mobili au o utilitate din ce in ce mai mare si o data cu aceasta varietatea si performantele lor cresc. In functie de directiile principale de cercetare in domeniu robotii se pot clasifica astfel: in functie de dimensiuni(macro, micro, nano)
- In functie de mediul in care actioneaza( terestri, subacvatici, zburatori)
- In functie de sistemul care le permite deplasarea in mediul in care actioneaza(cu roti, cu senile, pasitori, taratori, saritori)
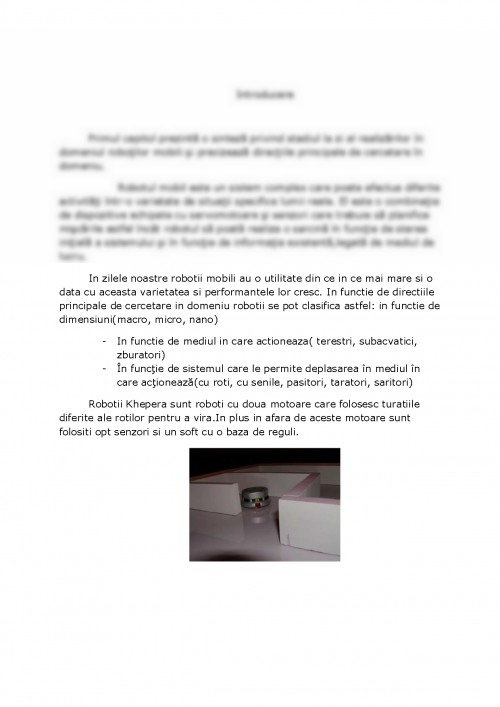
Robotii Khepera sunt roboti cu doua motoare care folosesc turatiile diferite ale rotilor pentru a vira.In plus in afara de aceste motoare sunt folositi opt senzori si un soft cu o baza de reguli.
Formularea problemei
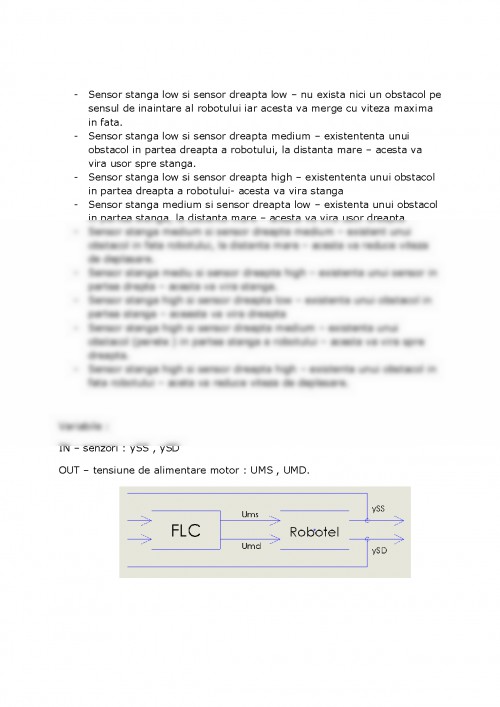
Se cere proiectarea unui system fuzzy pentru un robot mobil
In cadrul proiectului problema de rezolvat propusa este evitarea obstacolelor de catre robotul mobil prin schimbarea sensului de mers al acestuia in momentul in care este primit semnal de la senzori.
O abordare pentru controlul robotului, logica fuzzy, incearca sa capteze aspecte importante de luare a deciziilor umane. Formand o prezentare ambigue, vaga, sau uneori prin lipsa acesteia, logica fuzzy imbunatateste capacitatea de a face fata problemelor din lumea reala.
Design-ul classic al sistemului fuzzy consta in:
-Definirea obiectivelor si a criteriilor
-Determinarea relatiilor de intrare/ iesire
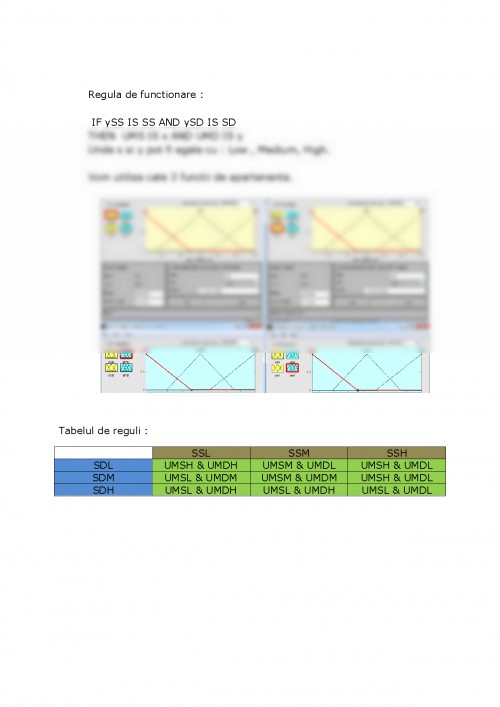
-Crearea de functii impreuna cu regulile ulterioare pentru a ingloba o solutie
-Aplicarea acestor reguli
-Verificarea si evaluarea sistemului
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.