
Realizarile recente ale - tiin- ei - i tehnicii, au demonstrat ca o automatizare eficienta a produc- iei, mai ales in domeniul construc- iei de ma- ini, se poate realiza doar cu ajutorul unei automatizari suple, in cadrul unor celule - i linii de fabrica- ie flexibile, bazate in principal pe ma- ini-unelte cu comanda program numerica (CNC) - i robo- i industriali.
Daca in anii '60 comanda numerica pentru ma- ini-unelte a ajuns la maturitate iar anii '70 au constituit deceniul afirmarii microprocesoarelor - i a calculatoarelor electronice, anii '80 au fost deceniul roboticii, in care robotul, ajuns la maturitate, a fost acceptat de industrie preluand activita- i rutiniere - i periculoase pentru operatorul uman.
Pentru actualul deceniu se are in vedere generalizarea utilizarii robo- ilor simpli, cresterea folosirii in mediul indusrial a robo- ilor evolua- i cu posibilita- i de aadaptare la mediul de lucru - i apari- ia in mediul industrial a primilor robo- i evolua- i cu caracteristici inteligente.
Robotica este acea ramura a - tiin- ei care se ocupa cu studiul opera- iilor umanoide, respectiv opera- iile executate de om prin utilizarea bra- elor - i mainilor - i coordonate de catre vaz.
Robotul poate fi definit ca un operator reprogramabil - i multifunc- ional, canceput pentru deplasarea de obiecte sau dispozitive pe treaiectorii reprogramabile, in vederea realizarii unor sarcini variate - in accep- iunea Institutului american de robotica. Robotul industrial este deci un robot care efectueaza opera- ii specifice proceselor tehnologice industriale.
Robotul se caracterizeaza in primul rand prin versatilitate - i autoadaptare la mediul de lucru. Versatilitatea reprezinta aptitudinea robotului de a executa acceia- i sarcina in moduri diferite - i depinde de numarul de grade de libertate al robotului. Autoadaptarea se intalne- te numai la robo- i evolua- i - i reprezinta capacitatea robotului de a indeplini sarcini incomplet specificate, chiar - i in prezena modificarilor neprevazute ale mediului.
In lucrarea de fa- a se pune accentul pe sistemul senzorial al robo- ilor industriali, care permite interac- iuni robot-mediu. Partea a doua a lucrarii, cea de cercetare, consta in localizarea obiectelor cu ajutorul senzorilor inductivi.
CAPITOLUL 2
SISTEMUL SENZORIAL AL ROBO- ILOR INDUSTRIALI
2.1. Probleme generale. Clasificarea senzorilor pentru robo- i.
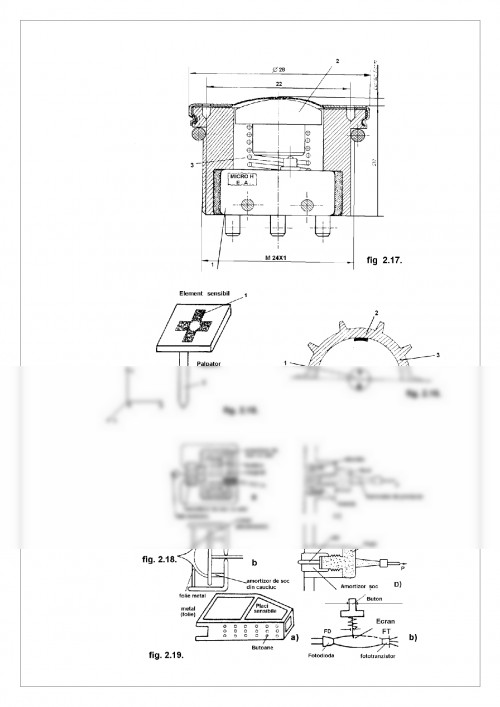
Pentru a realiza interac- iunea robot-mediu trebuie sa existe elemente sensibile (senzori), care sa masoare diferitele caracteristici ale mediului, sau ale obiectelor din mediu - i o unitate de calcul, care sa prelucreze in timp real informa- ia senzoriala, sa o transforme intr-o forma utila pentru sistemul de comanda. Acesta din urma, in func- ie de sarcina de indeplinit - i informa- ia despre modificarea mediului de lucru, ia decizii pentru modificarea ac- iunilor in curs de desfa- urare, sau genereaza noi ac- iuni.
Pentru buna func- ionare a unui robot industrial trebuie indeplinite doua func- ii:
- Func- ia de sesizare, indeplinita de senzori;
- Func- ia de masurare, indeplinita de traductori.
Traductorul indepline- te, de fapt, - i func- ia de sesizare, ingloband pentru aceasta
In etajul de captare a marimilor de intare Xi, senzori sau sesizori (fig. 2.1.)
In aceasta structurare se constata ca traductorul emite valori masurate, codificate sau nu, ca ,,imagine" a marimii de masurat.
Caracterul - i volumul informa- iilor utilizate de sistemul senzorial depinde de func- ia scop asociata robotului - i de gradul de autonomie care i se confera. Cu informa- ia ob- inuta de la sistemul senzorial robotul i- i construie- te - i i- i actualizeaza in permanen- a ,,modelul lumii" in care evolueaza, modelul func- ie de care i- i va gener planurile de ac- iune viitoare.
Senzorii pentru aplica- ii robotice trebuie sa indeplineasca o serie de calita- i ca de exemplu caracteristici statice cat mai liniare, caracteristici dinamice stabile, viteza mare de raspuns, stabilitate la varia- ia parametrilor mediului ambiant, caracteristici reproductibile, robuste- e - i fiabilitate mare in func- ionare.
In concordan- a cu modificarile imprevizibile ale mediului inconjurator un robot industrial are nevoie de urmatoarele categorii de informa- ii :
- Descrierea generala a mediului de lucru;
- Caracteristicile fizico-chimice ale obiectelor cu care intra in interac- iune;
- Pozi- ia - i orientarea robotului - i a organelor sale efectuare.
Deci ei pot sa exploreze zona de lucru de contact, cea apropiata, cea indepartata, sau foarte indepartata.
Un criteriu de clasificare se bazeaza chiar pe distana de la care sunt culese informa- iile (criteriu folosit in lucrarea de fa- a):
- Senzori de zona indepartata - i foarte indepartata; furnizeaza informa- ii despre toata zona de lucru a robotului - i pot fi realiza- i ca echipamente TV, electromagnetice, acustice sau pe baza de radia- ii, echipand mai ales robo- ii mobili.
- Senzori de zona apropiata (senzori de proximitate); furnizeaza informa- ii despre existena obiectelor fara ca mana robotului sa intre in contact cu obiectele - i sunt frecvent realiza- i ca senzori optici, pneumatici sau electromagnetici. Intrucat informa- ia despre existena obiectului este furnizata inainte de stabilirea contactului, se pot
1. Cristea Pal - Sisteme de conducere a robo- ilor industriali, Rotaprint, Ia- i, 1989;
2. D. Zetu, N. Gojine- chi, - a. - Robotica industriala, Ed. Satya, Ia- i, 1997;
3. L. Ciobanu - Manipulatoare - i robo- i industriali, Rotaprint, Ia- i, 1994;
4. A. Davidoviciu, A. Moanga - Robo- i evolua- i - i automatizari flexibile, Ed. Tehnica, Bucure- ti, 1985;
5. Gh. Slabu - Programare an Turbo Pascal, Rotaprint, Ia- i, 1996;
6. *** - Amplificator de masura cu frecven- a purtatoare N2314 - Carte tehnica, I.E.M.I., Bucure- ti;
7. *** - modulul de afiare numerica N2323 - Carte tehnica, I.E.M.I., Bucure- ti.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.