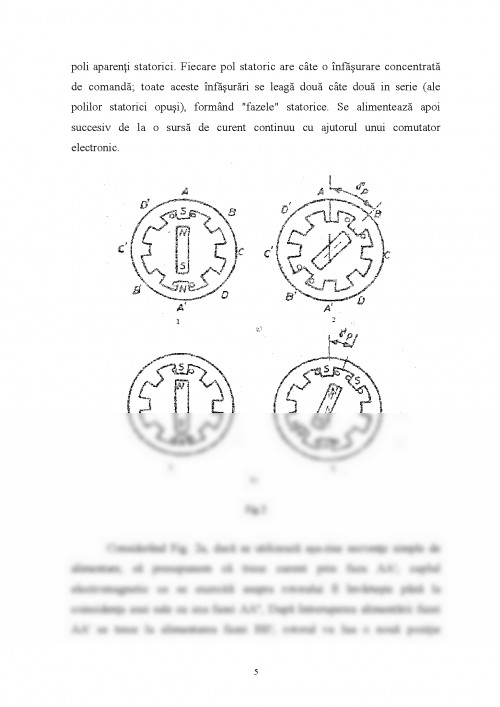
1.1. Principiul constructiv si de functionare
Motorul pas cu pas are o utilizare larga, datorita tendintei de functionare numerica a elementelor din structura sistemelor de comanda si reglare a actionarilor electrice. Aceasta tendinta s-a vadit odata cu aparitia masiva a circuitelor electronice sub forma integrata. Folosirea pe scara larga a motoarelor pas cu pas se explica si prin aparitia structurilor ierarhizate, mari si complexe ce inlocuiesc sistemele clasice, care permit optimizari globale prin folosirea calculatorului,
Dat fiind ca motorul pas cu pas este un element de executie cu functia de convertor electromecanic digital-analog (impuls --unghi) este evidenta intrebuintarea lui in sistemele ele comanda si reglare numerica.
Motorul pas cu pas realizeaza conversia directa a semnalului de intrare, dat sub forma numerica, intr-o miscare unghiulara discontinua sau incrementala. In acest fel miscarea obiectului reglat este cuantizata in deplasari discontinue, in deplina concordanta cu evolutia semnalelor discrete de comanda.
Datorita acestor proprietati motoarele pas cu pas permit realizarea unor sisteme de reglare de tip discret, care prezinta remarcabilul avantaj de a nu avea nevoie de bucle de reactie pentru corectarea miscarii.
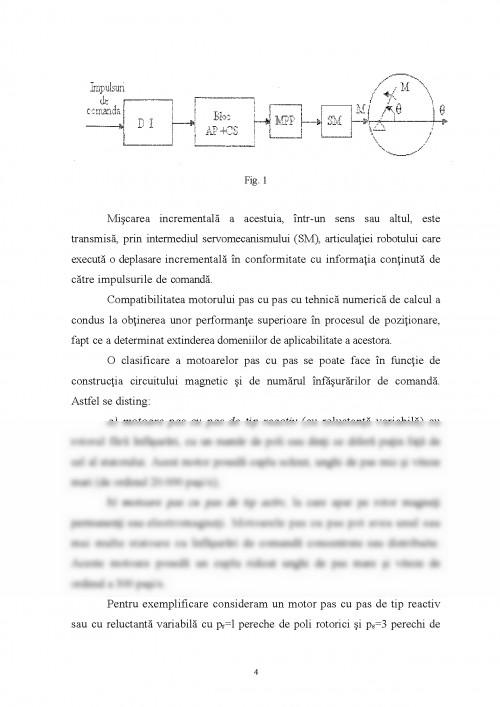
Schema bloc de principiu a sistemului de reglare incrementala a pozitiei articulatiei de tip rotatie a unui robot este data in Fig. L
Fig. 1
Miscarea incrementala a acestuia, intr-un sens sau altul, este transmisa, prin intermediul servomecanismului (SM), articulatiei robotului care executa o deplasare incrementala in conformitate cu informatia continuta de catre impulsurile de comanda.
Compatibilitatea motorului pas cu pas cu tehnica numerica de calcul a condus la obtinerea unor performante superioare in procesul de pozitionare, fapt ce a determinat extinderea domeniilor de aplicabilitate a acestora.
O clasificare a motoarelor pas cu pas se poate face in functie de constructia circuitului magnetic si de numarul infasurarilor de comanda. Astfel se disting:
a) motoare pas cu pas de tip reactiv (cu reluctanta variabila) cu rotorul fara infasurari, cu un numar de poli sau dinti ce difera putin fata de cel ai statorului. Acest motor poseda cuplu scazut, unghi de pas mic si viteze mari (de ordinul 20.000 pasi/s);
b) motoare pas cu pas de tip activ, la care apar pe rotor magneti permanenti sau electromagneti. Motoarele pas cu pas pot avea unul sau mai multe statoare cu infasurari de comanda concentrate sau distribuite. Aceste motoare poseda un cuplu ridicat unghi de pas mare si viteze de ordinul a 300 pasi/s.
Pentru exemplificare consideram un motor pas cu pas de tip reactiv sau cu reluctanta variabila cu pr=l pereche de poli rotorici si ps=3 perechi
1. Alexandru Fransua, Razvan Magureanu, Masini si actionari electrice. Elemente de executie, Edituta Tehnica, 1986, pag. 513
2. Gheorghe Tunsoiu, Emanuel Serain, C. Saal, Actionari electrice, Edituta Didactica si Pedagogica, Bucuresti, 1982
3. Horia Gavrila, Electrotehnica si echipamente electrice, vol. II, Editura Didactica si Pedagogica, Bucuresti, 1994, pag. 316
4. Mircea Ivanescu, Roboti industriali, Editura Universitaria, Craiova, 1994
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.