
1. Obtinerea datelor experimentale
1.1. Introducere
In figura urmatoare este prezentat un CNC actionat cu motoare BLDC.
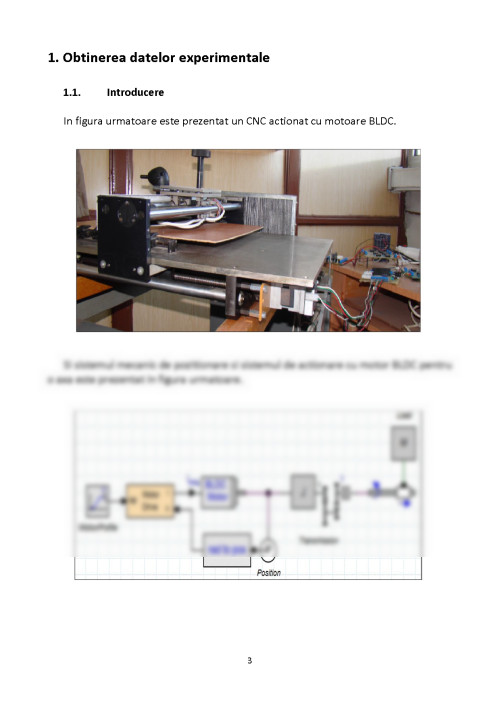
Si sistemul mecanic de pozitionare si sistemul de actionare cu motor BLDC pentru
o axa este prezentat in figura urmatoare.
4
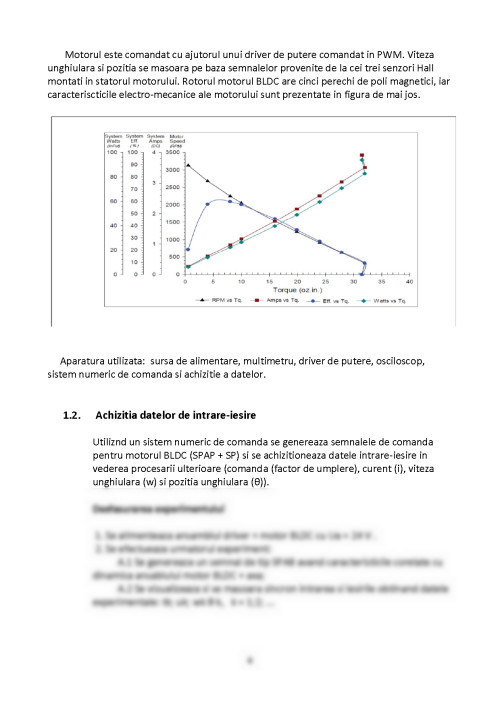
Motorul este comandat cu ajutorul unui driver de putere comandat in PWM. Viteza
unghiulara si pozitia se masoara pe baza semnalelor provenite de la cei trei senzori Hall
montati in statorul motorului. Rotorul motorul BLDC are cinci perechi de poli magnetici, iar
caracteriscticile electro-mecanice ale motorului sunt prezentate in figura de mai jos.
Aparatura utilizata: sursa de alimentare, multimetru, driver de putere, osciloscop,
sistem numeric de comanda si achizitie a datelor.
1.2. Achizitia datelor de intrare-iesire
Utiliznd un sistem numeric de comanda se genereaza semnalele de comanda
pentru motorul BLDC (SPAP + SP) si se achizitioneaza datele intrare-iesire in
vederea procesarii ulterioare (comanda (factor de umplere), curent (i), viteza
unghiulara (w) si pozitia unghiulara (θ)).
Desfasurarea experimentului
1. Se alimenteaza ansamblul driver + motor BLDC cu Ua = 24 V
2. Se efectueaza urmatorul experiment:
A.1 Se genereaza un semnal de tip SPAB avand caracteristicile corelate cu
dinamica ansablului motor BLDC + axa;
A.2 Se vizualizeaza si se masoara sincron intrarea si iesirile obtinand datele
experimentale: tk; uk; wk θ k, k = 1;2;
5
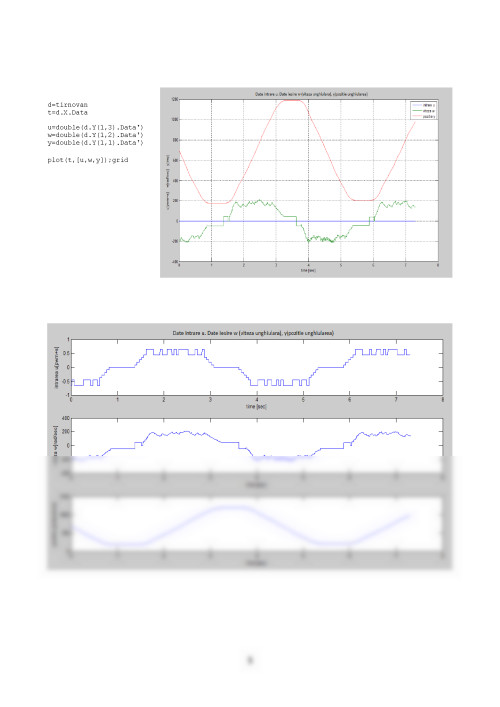
d=tirnovan
t=d.X.Data
u=double(d.Y(1,3).Data')
w=double(d.Y(1,2).Data')
y=double(d.Y(1,1).Data')
plot(t,[u,w,y]);grid
6
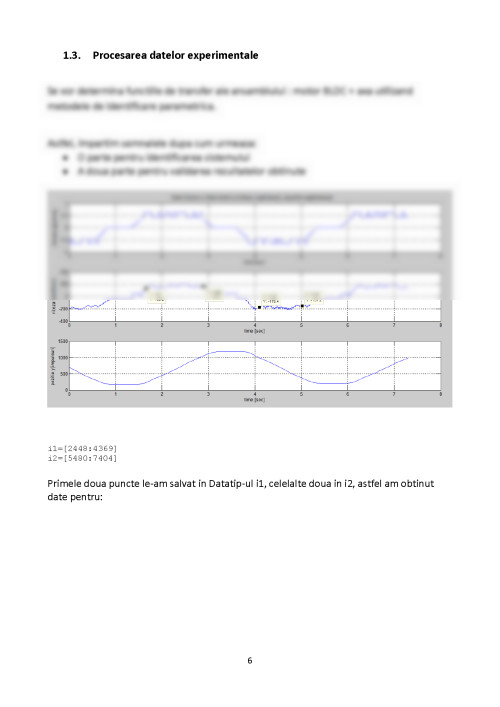
1.3. Procesarea datelor experimentale
Se vor determina functiile de transfer ale ansamblului : motor BLDC + axa utilizand
metodele de identificare parametrica.
Astfel, impartim semnalele dupa cum urmeaza:
- O parte pentru identificarea sistemului
- A doua parte pentru validarea rezultatelor obtinute
i1=[2448:4369]
i2=[5480:7404]
Primele doua puncte le-am salvat in Datatip-ul i1, celelalte doua in i2, astfel am obtinut
date pentru:
Pentru a descărca acest document,
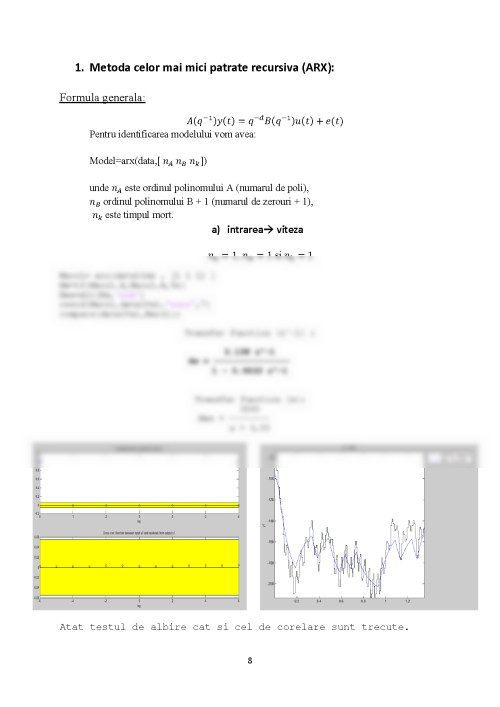
trebuie să te autentifici in contul tău.