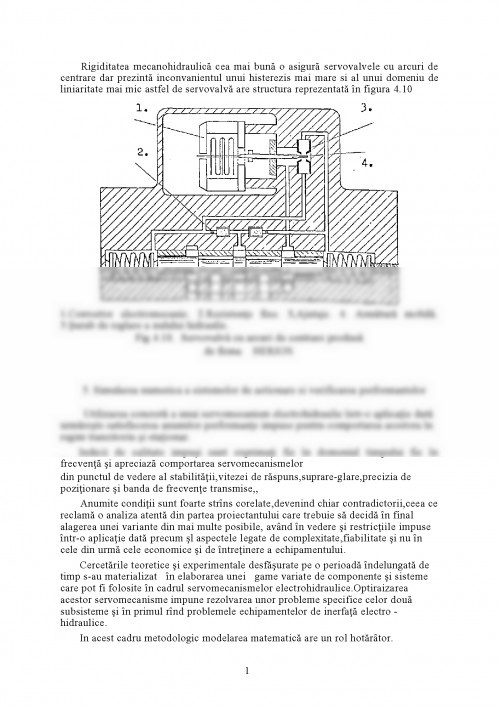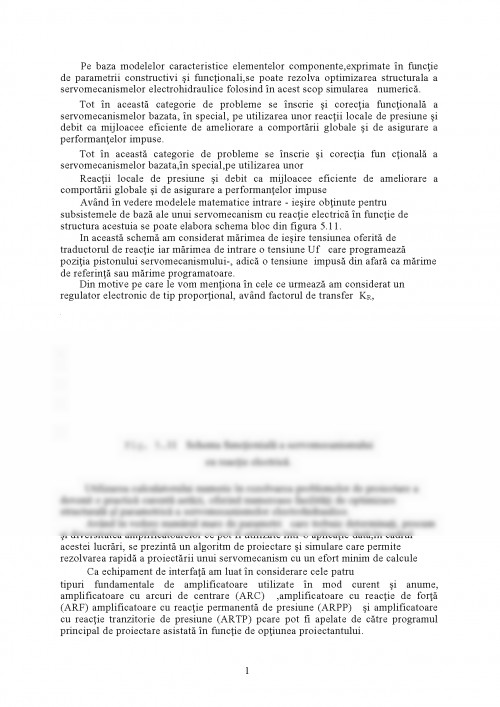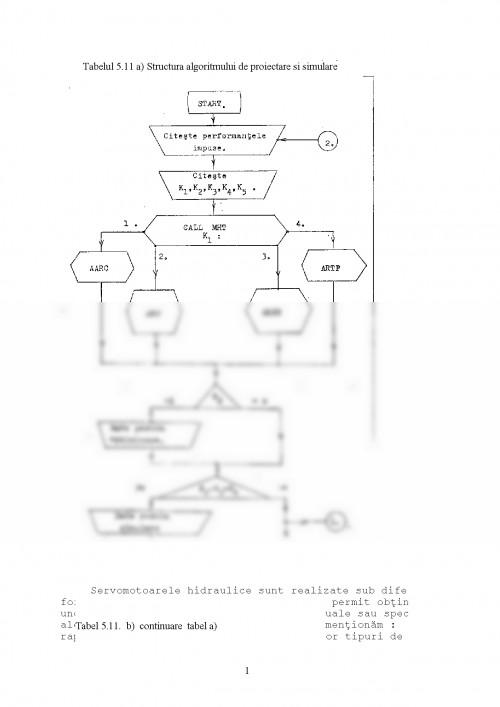
Proiectarea unui sistem de pozitionare liniara, a unei sarcini inertiale folosind ca elemente de actionare unn motor hidraulic cu miscare de translatie.
I. Date:
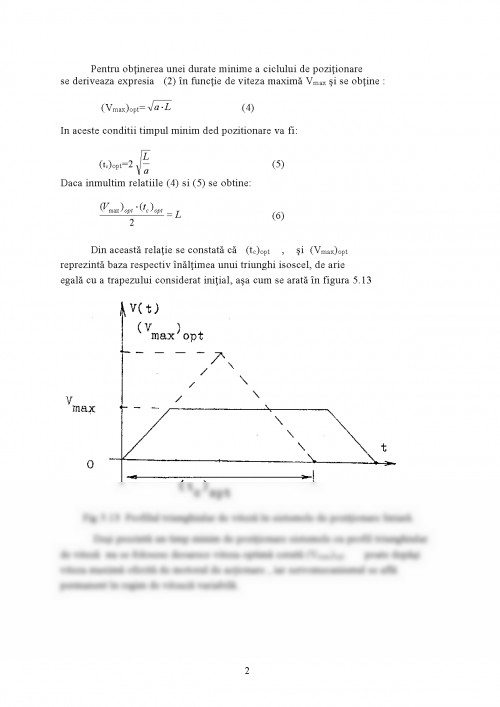
1. Distanta de pozitionare L=60 cm
2. Presiunea de alimentare P0=40 bari
3. Masa sarciniii M=400 kg
4. Motor incorporat , tija pistonului kt=10 V/ 80 cm
II. Continut:
1. Consideratii generale
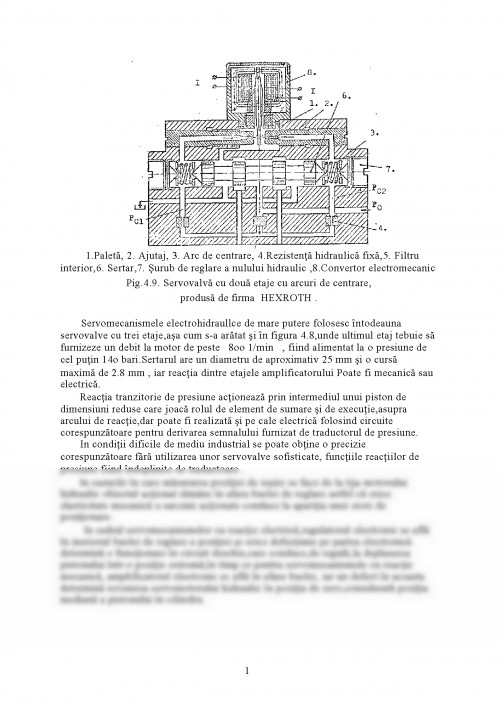
Servomotoarele hidraulice formeaza partea finala,de executie, a servomecanizmelor electrohidraulice avand un dublu rol, informa- tional si de vehiculare a unor puteri importante de la sursa de energie hidraulica, la sarcina.
Functionarea lor se bazeaza pe transformarea energiei potentia- le a unui fluid sub presiune in energie mecanica oferind la iesire o deplasare rectilinie alternativa sau o miscare de rotatie con- tinua sau oscilanta a elementului actionat.
Servomotoarele hidraulice sunt realizate sub diferite forme constructive si functionale care le permit obtinerea unor perfor- mante adaptate aplicatiilor uzuale sau speciale ale acestor servomecanisme, printre care mentionam : raport putere - greutate net su- perior altor tipuri de motoare utilizate in practica, dezvoltarea unor forte sl cupluri mari la iesire, viteze ridicate de actionare, posibilitatea realizarii unor regimuri de accelerare si decelerare riguros controlabile, fiabilitate ridicata si viteza mare de raspuns.
In cadrul sistemelor de actionare se utilizeaza aproape in exclusivitate motoare hidraulice volumice, care realizeaza conversia energiei prin modificarea unor volume de fluid.
Din punct de vedere constructiv aceste servomotoare se intalnesc intr-o gama larga de tipodimensiuni, pentru diferite presiuni si debite care acopera toate cerintele de viteza si forta, impuse in aplicatiile practice.
2. schema de principiu a unui motor hidraulic
Dupa modul de transmitere al fortei, motoarele hidraulice pot fi cu tija bilaterala sau unilaterala, iar dupa elementul mobil se intalnesc motoare cu tija mobila sau cu cilindru mobil.
Daca revenirea tijei se face ca urmare a actiunii unui arc atunci motorul este cu simpla actiune in toate celelalte cazuri motoarele sunt cu dubla actiune
In tabelul 2.1 sunt prezentate principalele tipuri de motoare hidraulice utilizate in constructia servomecanismelor electrohidraulice.
Tehnologia de executie a servomotoarelor hidraulice este in general de mare precizie si depinde de performantele cerute in di- verse aplicatii, de exemplu camasa cilindrica a servomotoarelor hi- draulice liniare este confectionata din teava de otel laminat, sau otel carbon de calitate, aliat corespunzator, iar in cazuri specia- le din aliaje de aluminiu avand o inalta rezistenta mecanica.
Prelucrarea suprafetelor cilindrice interioare se face prin gaurire sau strunjire dupa care urmeaza o rectificare si honuire pentru ca in final sa rezulte o rugozitate sub 0,4 - m.
In aplicatiile de mare tehnicitate cum sunt cele din aviatie, suprafetele cilindrice se cromeaza sau se eloxeaza cromic si apoi se rectifica iar in final se rodeaza, pretul de cost al servomoto- rului crescand rapid cu precizia de prelucrare.
Tabelul 2.1, SERVOMOTOARE HIDRAULICE.
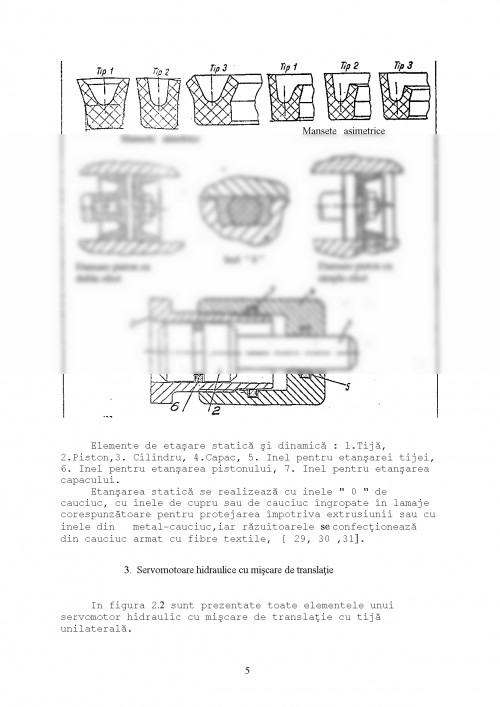
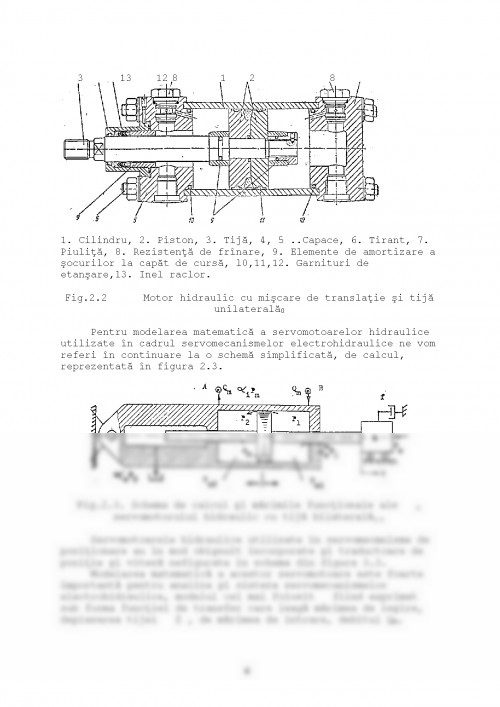
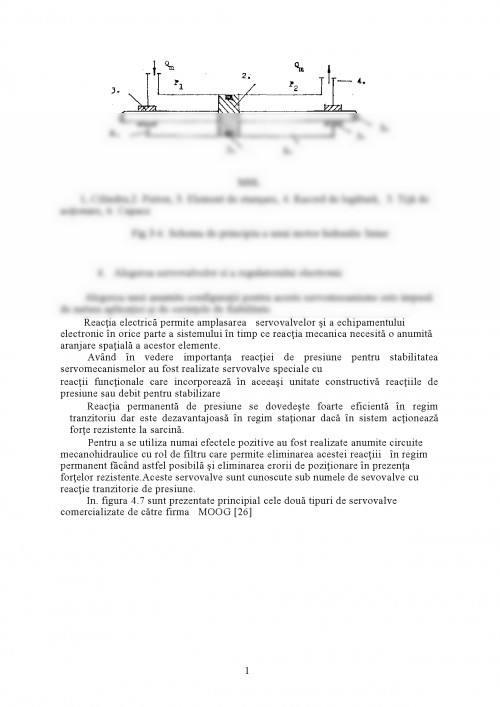
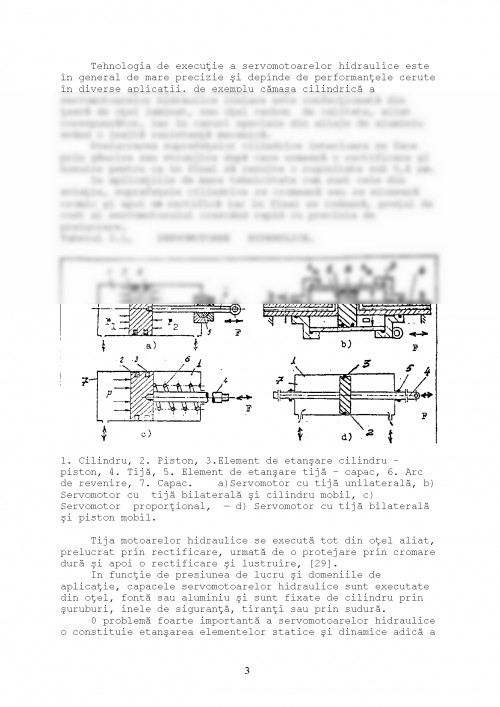
1. Cilindru, 2. Piston, 3.Element de etansare cilindru - piston, 4. Tija, 5. Element de etansare tija - capac, 6. Arc de revenire, 7. Capac. a)Servomotor cu tija unilaterala, b) Servomotor cu tija bilaterala si cilindru mobil, c) Servomotor proportional, - d) Servomotor cu tija bilaterala si piston mobil.
Tija motoarelor hidraulice se executa tot din otel aliat, pre- lucrat prin rectificare, urmata de o protejare prin cromare dura si apoi o rectificare si lustruire, [29].
In functie de presiunea de lucru si domeniile de aplicatie, capacele servomotoarelor hidraulice sunt executate din otel, fonta sau aluminiu si sunt fixate de cilindru prin suruburi, inele de si- guranta, tiranti sau prin sudura.
0 problema foarte importanta a servomotoarelor hidraulice o constituie etansarea elementelor statice si dinamice adica a ele- mentelor fixe sau mobile, care determina in mare masura randamentul, sensibilitatea, fiabilitatea in exploatare si comportarea dinamica
1. I. Catana si V. Panduru ,,Conducerea inteligenta a sistemelor electrohidraulice Printech 2004 "
2. I. Catana ,, Servomecanisme electrohidraulica UPB 1995 "
3. I. Catana ,, Sisteme automate electrohidraulice UEP 1995 "
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.