1. Introducere
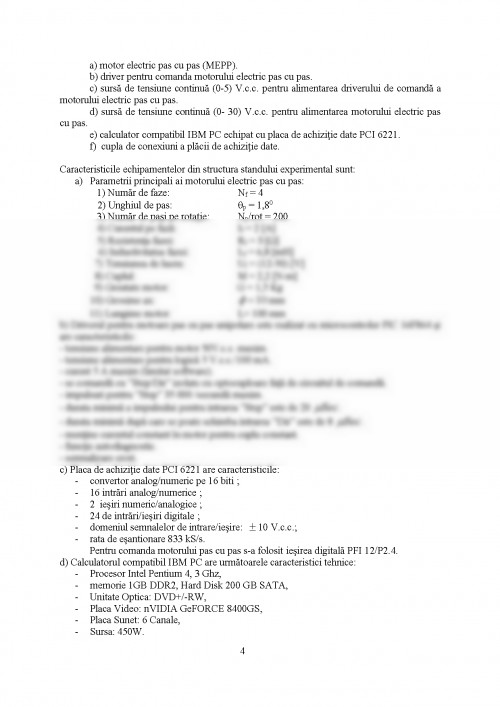
Motorul electric pas cu pas reprezinta un caz particular al masinii sincrone si are fata de aceasta anumite particularitati constructive si de functionare. Infasurarile de comanda ale motorului fiind alimentate cu impulsuri de tensiune dreptunghiulare, rotorul sau are o miscare de rotatie intermitenta sub forma de deplasari unghiulare succesive. Spre deosebire de motoarele sincrone clasice motoarele pas cu pas intra in sincronism fara alunecare, iar franarea se realizeaza fara iesirea din sincronism. Datorita acestui fapt ele asigura in domeniul de functionare porniri bruste, opriri si reversari fara pierderea informatiei sau fara omisiuni de pas. Infasurarile de comanda a motoarelor pas cu pas se pot alimenta in mod separat sau in grupuri in diferite combinatii. Fiecarei combinatii sau tact de comutatie ii corespunde o orientare spatiala determinata a campului magnetic rezultant in intrefierul masinii. Ca si motoarele sincrone clasice, motoarele pas cu pas se clasifica in functie de constructia circuitului magnetic si de numarul infasurarilor de comanda. Se deosebesc doua tipuri de baza:
1. Motoare pas cu pas de tip activ cu infasurari de excitatie in rotor sau cu magnet permanent.
2. Motoare pas cu pas de tip reactiv sau cu reluctanta variabila. Ambele tipuri pot fi realizate cu un singur stator sau cu mai multe statoare, pentru fiecare corespunzand o infasurare de comanda.
2. Motoare pas cu pas de tip activ
Statorul motorului are patru poli aparenti, pe care sunt dispuse doua infasurari de comanda si un rotor cu magnet permanent sau infasurari de excitatie avand doi poli. Fiecare infasurare de excitatie este dispusa pe doi poli statorici diametrali, fig. 1.
Fig. 1
Prin alimentarea primei infasurari in bornele cu o tensiune avand polaritatea indicata in figura 1, rotorul se va orienta astfel incat directia axei polilor sa coincida cu directia axei infasurarii. In aceasta pozitie atractia intre polii statorici si rotorici este maxima.
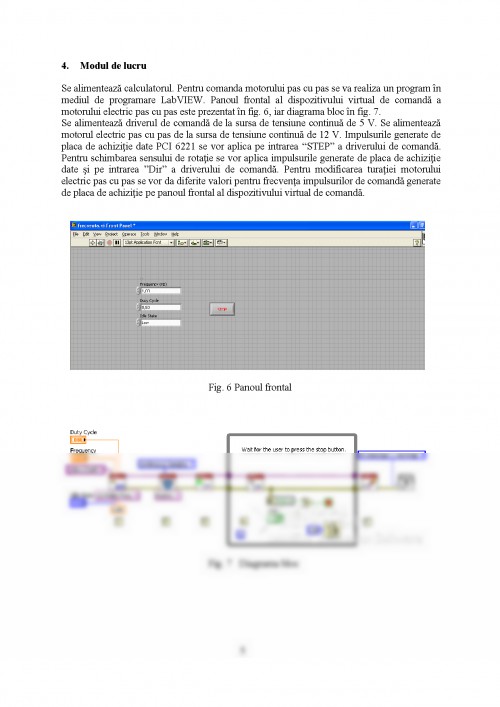
Prin decuplarea primei infasurari si alimentarea celei de-a doua infasurari intre bornele , rotorul se va roti cu astfel incat polii statorici si rotorici de nume contrar vor fi fata in fata. In continuare pentru ca rotorul sa-si mentina sensul de rotatie este necesar ca la o noua cuplare a infasurarii 1 si apoi a infasurarii 2 polaritatea tensiunii aplicate sa fie inversa. Figura 2 reprezinta succesiunea pozitiei rotorului precum si polaritatea polilor statorici pentru patru tacturi succesive.
Fig. 2
In cazul prezentat unghiurile succesive efectuate de rotor pentru fiecare impuls de comanda sunt de .
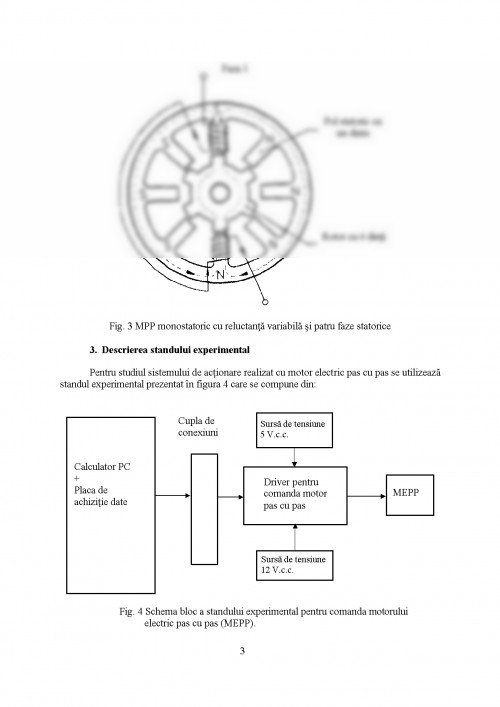
3. Motoare pas cu pas de tip reactiv sau cu reluctanta variabila
Din punct de vedere constructiv exista 6 tipuri de MPP: solenoidal, cu reluctanta variabila, cu magnet permanent in stator, cu magnet permanent in rotor, cu magnet permanent si reluctanta variabila (hibrid) si electromecanic.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.