
In practica industriala apar frecvent probleme privind sinteza
compensatoarelor in cazul unor instalatii relativ simple, caracterizabile
printr-un model matematic cu complexitate redusa si pentru care
performantele sunt putin restrictive. In astfel de cazuri sunt prezentate
compensatoare cu o constructie standardizata (regulatoare PID). Sinteza
compensatorului intr-o astfel de situatie consta in alegerea structurii si a
parametrilor dispozitivului de reglare. Cea mai simpla procedura de
alegere a parametrilor consta in utilizarea unor criterii practice, care pe
baza unor fundamentari teoretice, permit stabilirea unor formule de calcul
a parametrilor regulatorului utilizand date preluate din analiza procesului
automatizat.
In aceasta lucrare prezentam un criteriu de acest gen si anume
criteriul Ziegler-Nichols. In forma originala, criteriul a fost propus in
1942 de catre Yohu G. Ziegler si Mathaniel B. Nichols si ramane cel mai
utilizat criteriu de acordare practica a regulatoarelor.
2. Formularea problemei
Criteriul este aplicabil in forma clasica pe o structura simpla de
sistem de reglare automata cu o singura marime de intrare si o singura
marime de iesire (Figura 1).
LUCRAREA nr.9: Sinteza SRA. Criteriul Ziegler - Nichols
Analiza si Sinteza Sistemelor Automate. Aplicatii -92- utilizand Matlab/Simulink
y (t) ? (t) u(t) y(t) ref H (s) c H (s) f
+
_
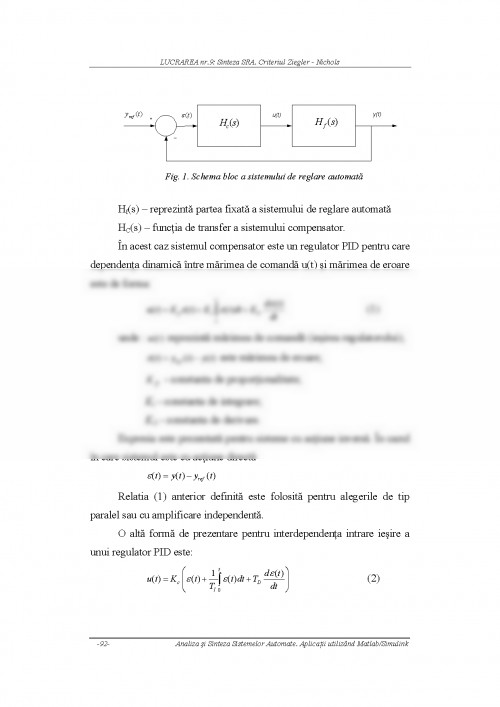
Fig. 1. Schema bloc a sistemului de reglare automata
Hf(s) - reprezinta partea fixata a sistemului de reglare automata
HC(s) - functia de transfer a sistemului compensator.
In acest caz sistemul compensator este un regulator PID pentru care
dependenta dinamica intre marimea de comanda u(t) si marimea de eroare
este de forma:
( ) ( ) ( ) ( )
t
p I D
o
u t K t K t dt K d t
dt
?
= ? + ?? + (1)
unde : u t ( ) reprezinta marimea de comanda (iesirea regulatorului);
( ) ( ) ( ) ref ? t = y t - y t este marimea de eroare;
K p - constanta de proportionalitate;
KI - constanta de integrare;
KD - constanta de derivare.
Expresia este prezentata pentru sisteme cu actiune inversa. In cazul
in care sistemul este cu actiune directa
( ) ( ) ( ) ref ? t = y t - y t
Relatia (1) anterior definita este folosita pentru alegerile de tip
paralel sau cu amplificare independenta.
O alta forma de prezentare pentru interdependenta intrare iesire a
unui regulator PID este:
0
( ) ( )
Documentul este oferit gratuit,
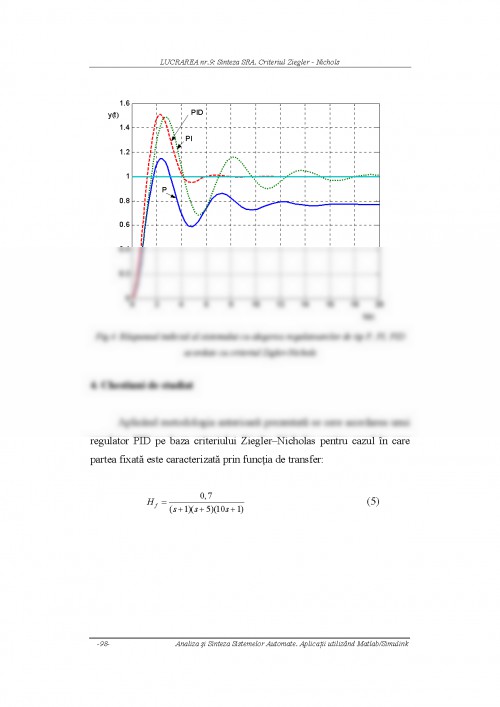
trebuie doar să te autentifici in contul tău.