Masina reprezinta un ansamblu de corpuri cu miscari determinate, care are ca scop
executarea unui lucru mecanic util sau transformarea unei forme de energie in energie
mecanica. Se disting masini motoare, care transforma diferite forme de energie in energie
mecanica, respectiv masini de lucru, care transforma energia mecanica in lucru mecanic. Din
prima categorie fac parte, de exemplu, masinile termice care transforma energia chimica a
combustibilului in energie mecanica. Masinile-unelte, ca masini de lucru, transforma energia
electrica in lucru mecanic.
Organele de masini sunt elemente constructive care intra in componenta masinilor,
avand forme si functii specifice. Modelele de calcul ale acestora le individualizeaza.
Studiul masinilor si al componentelor acestora (organele de masini) poate fi facut dupa
cunoasterea principiilor care descriu structura si functionarea mecanismelor.
Mecanismul reprezinta un ansamblu de elemente cinematice legate intre ele prin cuple
cinematice, fiecare element avand o miscare bine determinata. Prin intermediul cuplelor
cinematice se transmite miscarea si fluxul de putere.
Elementele cinematice pot fi:
a) solide
- rigide deformabile (bare, roti, came, tacheti etc.)
- flexibile (curele, cabluri)
- elastice (arcuri)
b) fluide (lichide sau gazoase).
De regula, se utilizeaza elemente cinematice solide rigide, nedeformabile sau cu
deformatii elastice neglijabile, care nu influenteaza cinematica si dinamica mecanismelor.
Elementele elastice sunt de obicei pasive, avand numai rolul de a permite readucerea
elementelor mecanismului in starea initiala de echilibru sau de functionare in regim stabil.
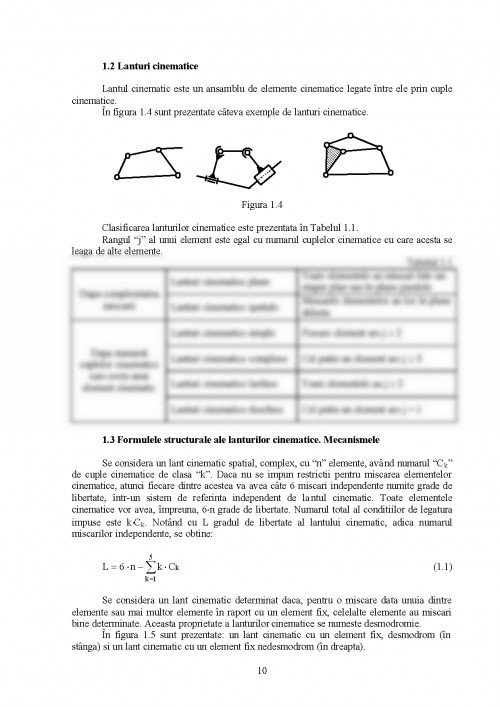
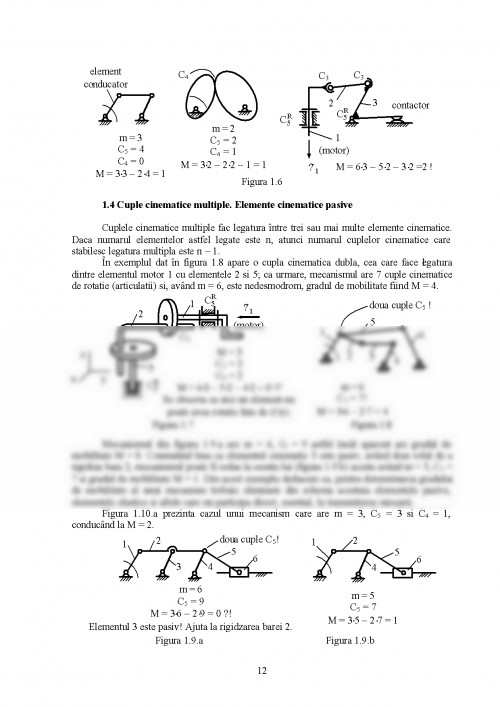
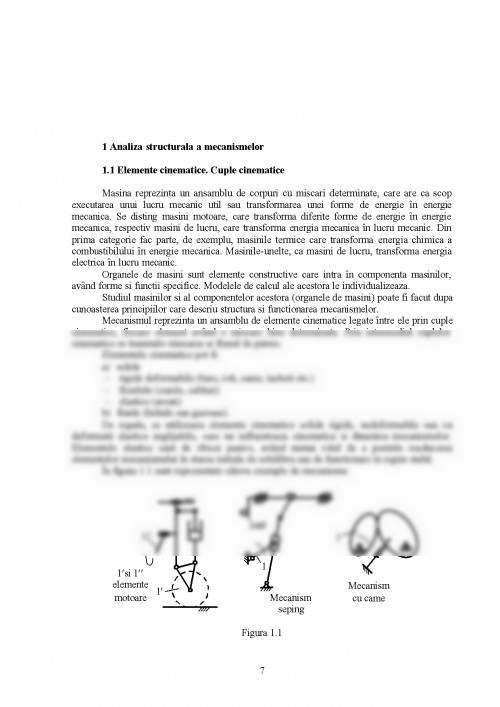
In figura 1.1 sunt reprezentate cateva exemple de mecanisme.
Figura 1.1
1- -
1-
1- si 1- -
elemente
motoare
1
cutit
Mecanism
seping
Mecanism
cu came
1
8
Dupa cum se poate observa, mecanismele reprezinta structura de baza a unei masini
simple; construirea masinilor utilizeaza functia cinematica a mecanismelor pentru a se putea
realiza transmiterea fluxului de putere si/sau de forta.
Cupla cinematica este legatura dintre doua elemente cinematice permitand miscarea
relativa dintre acestea; in structura unei masini, cupla cinematica are si rolul de a transmite
fluxul de putere sau/si de forta.
O cupla cinematica limiteaza posibilitatile de miscare relativa ale elementelor
cinematice aflate in legatura.
Un element cinematic independent are, in spatiu, 6 componente de miscare si anume
proiectiile vitezei de translatie (v) si ale vitezei unghiulare (w) pe cele 3 axe ale unui sistem
ortogonal: vx, vy, vz, wx, wy si wz. Aceste componente pot fi denumite grade de libertate. Prin
legarea intre ele a doua elemente cinematice printr-o cupla cinematica se pierd cel putin una si
cel mult 5 miscari relative independente. Ca urmare, numarul restrictiilor impuse de cupla
definesc clasa acesteia.
Cupla cinematica spatiala, care anuleaza o singura miscare independenta, este de clasa
intai (C1); cupla cinematica care anuleaza doua miscari independente este de clasa a doua
(C2); exemplificarea poate continua pana la cupla de clasa a cincea (C5) care permite o singura
miscare relativa independenta.
Asadar, clasa - k- a unei cuple cinematice indica numarul conditiilor de legatura
impuse, adica numarul miscarilor relative independente anulate. Clasa - k- a unei cuple
cinematice este cuprinsa intre 1 si 5.
Cupla care anuleaza 6 miscari relative independente nu este o cupla cinematica ci o
legatura rigida intre elemente.
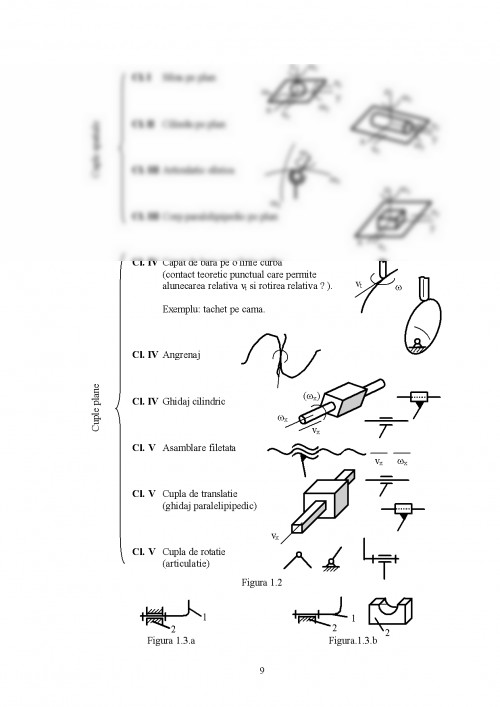
In figura 1.1 sunt prezentate exemple de cuple cinematice, clasificate dupa criteriul
structural al clasei de apartenenta.
Cuplele cinematice sfera/plan (C1), cilindru/plan (C2) si articulatia sferica (C3) sunt
cuple spatiale. Cupla cinematica corp paralelipipedic/plan (C3) este o cupla plana pentru ca
cele 3 miscari independente au loc in plan.
Cuplele cinematice (C4) si (C5) sunt cuple plane. Se poate observa ca, in cazul cuplelor
de tip cama/tachet si de tip angrenaj, miscarile relative independente sunt alunecarea relativa
dupa tangenta comuna si rostogolirea relativa. In figura 1.2, pentru cuplele plane a fost
prezentata si reprezentarea simbolica.
Cupla cinematica surub/piulita este de clasa a V-a, singura miscare permisa fiind
alunecarea relativa in lungul spirei care, in esenta este un plan inclinat.
Alte criterii pentru clasificarea cup lelor cinematice sunt:
a) criteriul constructiv, conform caruia se disting cuplele cinematice inchise
(figura 1.3.a) si cuplele cinematice deschise (figura 1.3.b);
b) complexitatea miscarii relative, conform careia cuplele cinematice sunt plane si
spatiale;
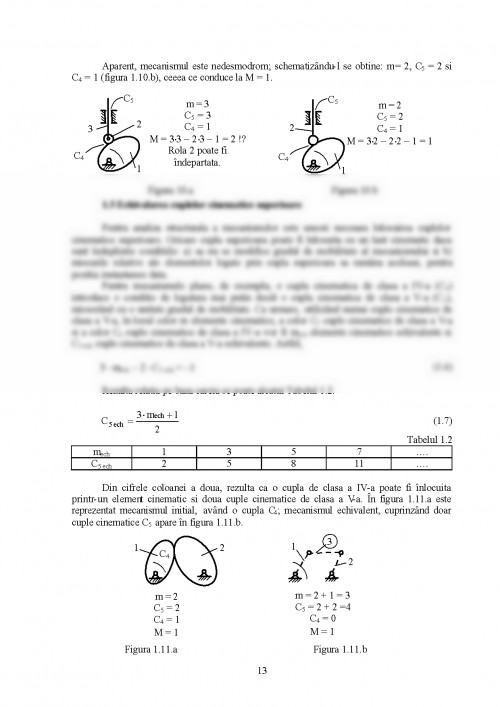
Dupa criteriul tipului contactului se disting cuplele cinematice superioare si cuplele
cinematice inferioare.
La cuplele cinematice superioare contactul dintre elemente se realizeaza teoretic
intr- un punct sau dupa o linie. In regim de incarcare, prin deformarea elastica a elementelor
conjugate, contactul se stabilizeaza pe o suprafata de forma circulara de diametru extrem de
mic, respectiv pe o fasie de latime extrem de redusa. Tensiunile de contact sunt, in aceste
cazuri, deosebit de mari conducand la uzarea rapida a elementelor cuplei daca ungerea nu este
adecvata.
La cuplele cinematice inferioare contactul se realizeaza pe o suprafata; ca urmare,
tensiunile de contact sunt reduse.
Cuplele cinematice superioare prezinta avantajul preciziei cinematice ridicate
Resetov, L., Self-aligning mechanisms, Mir Publishers, Moscow,1986.
2. Dranga, M., Mecanisme si organe de masini, Instititutul Politehnic Bucuresti,
1983.
3. Antonescu, P., Mecanisme. Calculul structural si cinematic, Institutul Politehnic
Bucuresti, 1979.
4. Manea, Gh., Organe de masini, Vol.I, Editura tehnica, Bucuresti, 1970.
5. Manolescu, N.I. s.a., Teoria mecanismelor si a masinilor, Editura didactica si
pedagogica, Bucuresti, 1972.
6. Movnin, M., Goltziker, D., Machine design, Mir Publishers, Moskow, 1975.
7. Pelecudi, C., Dranga, M., Dinamica masinilor, Institutul Politehnic Bucuresti,
1980.
8. Voinea, R., Mecanica, Editura didactica si pedagogica, Bucuresti, 1975.
9. Dobre, G., Mecanisme, Universitatea Politehnica Bucuresti, 1993,
10. Handra-Luca, s.a. Introducere in teoria mecanismelor, Vol. I.Cluj-Napoca, Editura
Dacia, 1983.
11. Demian, T. s.a. Mecanisme de mecanica fina, Bucuresti, Editura didactica si
pedagogica, 1982.
12. Pelecudi, Chr. s.a. Mecanisme, Bucuresti, Editura didactica si pedagogica, 1985.
13. Pelecudi, Chr. s.a. Algoritmi si programe pentru analiza mecanismelor, Bucuresti,
Editura tehnica, 1985.
14. Hamilton, M.H. si Reinholtz, C.F. Mechanisms and Dynamics of Maschinery,
John Wiley and Sons, 1987.
15. Doughty, S. Mechanics of Machines, John Wiley and Sons, 1987.
16. Angeles, J. si Lopez-Cajun, C.S. Optimization of Cam Mechanisms, Kluwer
Academic Publishers, 1991.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.