In functie de gradul de complexitate, se deosebesc trei tipuri principale de mecanisme sau transmisii cu roti dintate: 1) elementare, 2) simple si 3) complexe.
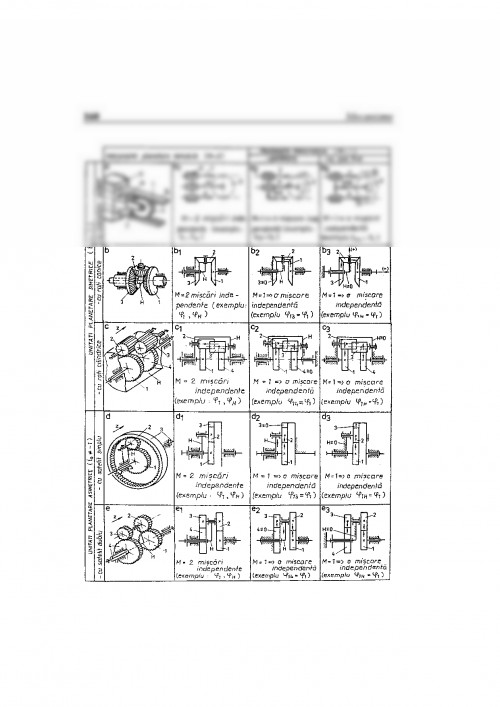
1)Un mecanism elementar cu roti dintate, denumit simplu si angrenaj, este format din doua roti, in angrenare, si un element suport-axe H, care materializeaza axele rotilor si mentine constanta distanta dintre acestea. Rotile unui angrenaj pot fi de forma circulara sau necirculara (eliptica, ovala, poligonala etc); deoarece au cea mai larga utilizare tehnica, in continuare sunt considerate numai angrenajele cu roti circulare. In tabelul 4.1 sunt sistematizate reprezentarile simplificate ale principalelor tipuri de angrenaje, cu roti circulare, folosite in tehnica. In functie de starea elementului H, un angrenaj poate fi: a) angrenaj cu axe fixe, daca elementul H este fix si b) angrenaj planetar, daca elementul H este mobil.
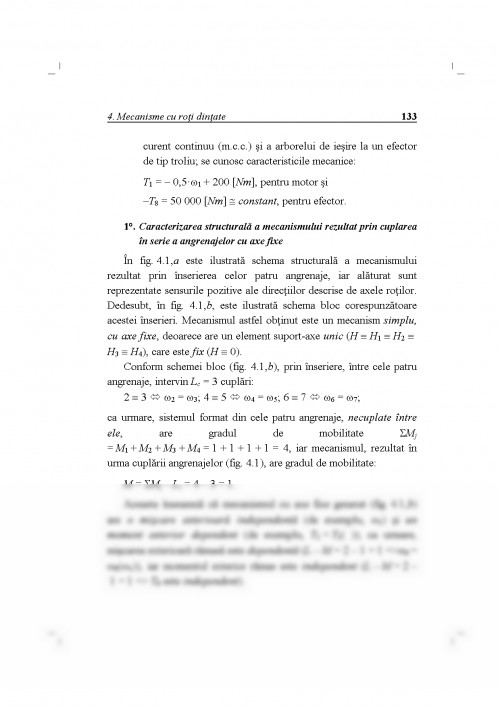
2)Un mecanism simplu cu roti dintate contine cel putin doua angrenaje si are un element suport-axe H unic; poate fi mecanism cu axe fixe, daca H este fix (v. fig. 4.1 si 4.7 ), sau mecanism planetar, daca H este mobil (v. tabelul 4.2 ).
3)Un mecanism complex cu roti dintate contine cel putin doua angrenaje si are cel putin doua elemente suport-axe Hj; j = 1,2,
In acest capitol sunt abordate, in interpretare inginereasca, urmatoarele doua probleme:
a)modelarea structurala, cinematica si statica a mecanismelor cu axe fixe (subcap.4.2), si
b)modelarea structurala, cinematica si statica a mecanismelor planetare simple, cu doua roti centrale (subcap. 4.3).
Pentru intuitivitate, rezolvarea problemelor enuntate se bazeaza pe utilizarea unor exemple aplicative reprezentative.
4.1. OBIECTIVE
Principalele obiective urmarite in acest capitol se refera la:
1?.Identificarea marimilor de stare structurala, cinematica si statica ale mecanismelor cu axe fixe, de tip serie, paralel si mixt, si stabilirea proprietatilor caracteristice acestor mecanisme;
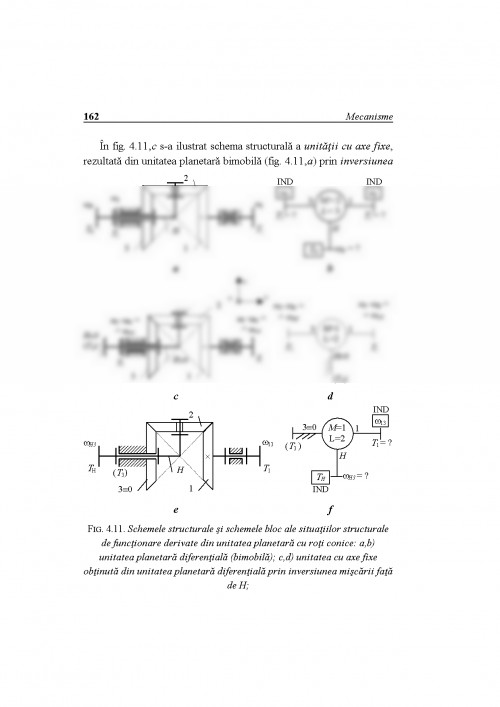
2?.Definirea notiunii de unitate planetara si identificarea situatiilor structurale de functionare ale unei unitati planetare;
3?.Identificarea marimilor de stare structurala, cinematica si statica ale unitatii planetare diferentiale si stabilirea proprietatilor caracteristice mecanismelor diferentiale.
4.2.MODELAREA STRUCTURALA, CINEMATICA SI STATICA A MECANISMELOR CU AXE FIXE
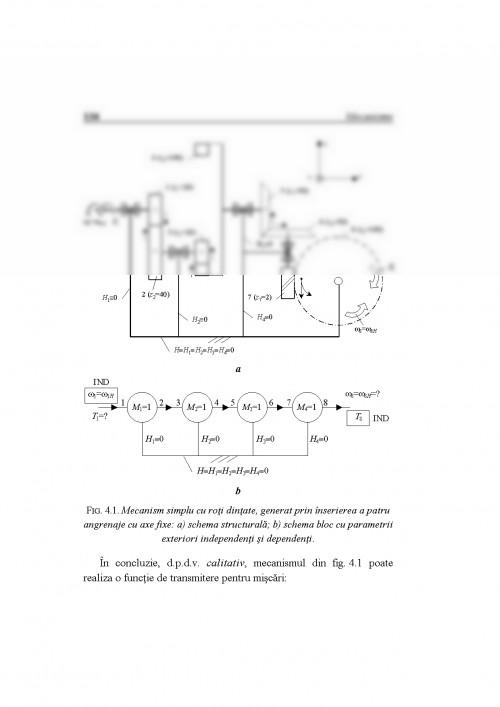
Tinand seama ca un angrenaj cu axe fixe este un mecanism monomobil (M = 1) cu o intrare si o iesire (L = 2), in continuare se propun doua aplicatii intuitive. Cu ajutorul acestor aplicatii se modeleaza, d.p.d.v. structural, cinematic si static, mecanismele cu axe fixe, de tip serie si, respectiv, paralel; pe baza interpretarii rezultatelor obtinute, se stabilesc apoi proprietatile cinematice si statice specifice acestor mecanisme.
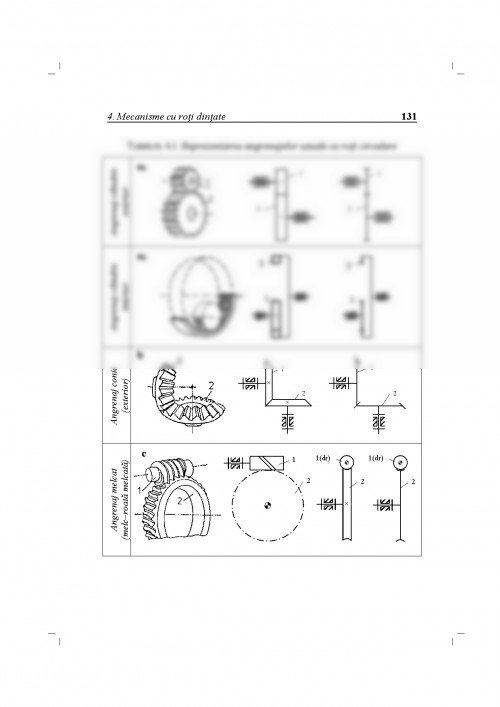
TABELUL 4.1. Reprezentarea angrenajelor uzuale cu roti circulare
Angrenaj cilindric exterior
Angrenaj cilindric interior
Angrenaj conic (exterior)
Angrenaj melcat
(melc-roata melcata)
4.2.1.Modelarea mecanismelor de tip serie
Pentru modelarea mecanismelor cu axe fixe, de tip serie, se propune urmatoarea aplicatie:
Se dau:
Patru angrenaje cu axe fixe:
- un angrenaj cilindric exterior (v. tab.4.1,a1), cu numerele de dinti z1 = 20, z2 = 40 si randamentul
Documentul este oferit gratuit,
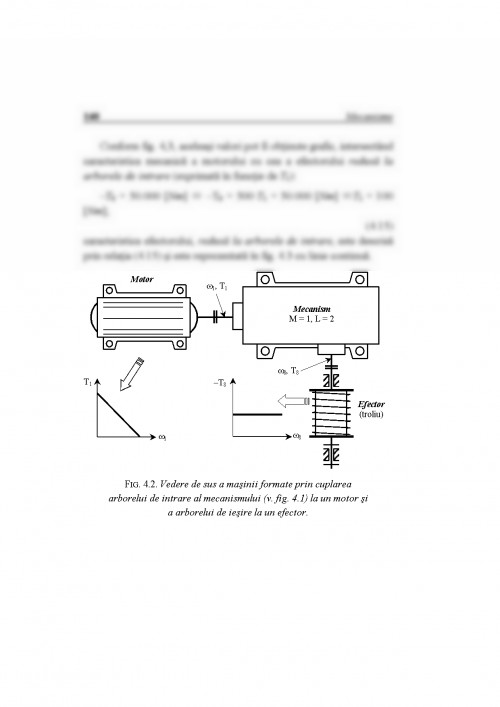
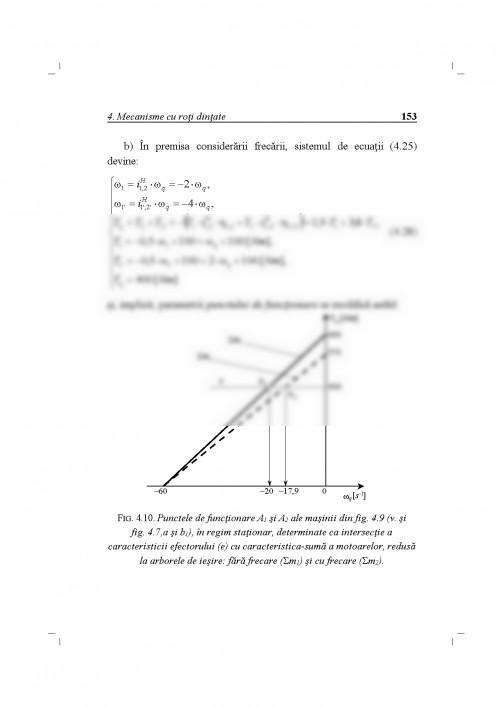
trebuie doar să te autentifici in contul tău.