Constructiile, create si realizate de om, sunt destinate unor anumite scopuri precise si se pot imparti in: constructii cu majoritatea elementelor fixe, cum ar fi; cladirile, podurile, rezervoarele, barajele, etc, si constructii cu majoritatea elementelor mobile, cum sunt; agregatele, masinile, aparatele, mecanismele.
Agregatul este un ansamblu tehnic, format din mai umlte unitati de lucru distincte, legate intre ele pentru a obtine un anumit scop final, imbunatatind parametrii tehnici si economici ai unitatilor componente, asa cum sunt: liniile de masini unelte, combinele de recoltat, automobilele, etc.
Masina este un sistem ethnic, in care partile componente au miscari determinate, daca se imprima o anumita miscare, unui element sau mai multor elemente, in scopul executarii unui lucru mecanic util, numita masina de lucru, sau de a transforma o forma de energie in alta forma, cunoscuta sub denumirea de masina motoare sau motor.
Masina de lucru poate fi prelucratoare ( masina textila, masina unealta, masina de presat, masina de macinat, etc) sau masina transportoare ( macara, banda transportoare, carucioare, pompe, autovehicole, etc). Masina motoate poate fi primara ( motor eolian, motor hidraulic ) cand se consuma o energie din natura sau masina motoare secundara (motor termic, motor electric ) cand se consuma o energie obtinuta in urma unei procesari.
Mecanismul este o parte componenta a unei masini, cu rolul de a transmite si transforma miscarea, de la un element conducator sau motor la un element condus sau de lucru.
Atat masina, in general, cat si mecanismul, in prticular, sunt caracterizate de anu- mite cicluri: energetice, cinematice, geometrice.
Ciclul energetic reprezinta o perioada de timp dupa care fortele si prin urmare energiile dezvoltate de elemente in miscare, recapata aceleasi valori.
Ciclul cinematic este o perioada de timp dupa care vitezele, elementelor sau ale unor puncte, au aceleasi valori.
6
Ciclul geometric este perioada dupa care elementul conducator isi recatata pozitia initiala.
In aceste conditii, mecanismul mai poate fi definit ca un sistem tehnic, din structura unei masini, cu un anumit rol functional, in care partile componente, numite elemente cinematice, au miscari periodice bine determinate daca se imprima o anumita miscare elementului conducator. In unele cazuri, pot fi mecanisme cu mai multe elemente conducatoare. De regula, elementele conducatoare sunt legate la un element fix, numit batiu. Daca elementul conducator nu este legat la batiu, el formeaza o grupa conducatoare. Elementele cu miscare determinata se numesc elemente conduse si pot fi intermediare, cand au numai rolul de a transmite miscarea si element de lucru, cand el executa lucrul mecanic util, pentru care mecanismul a fost proiectat si realizat.
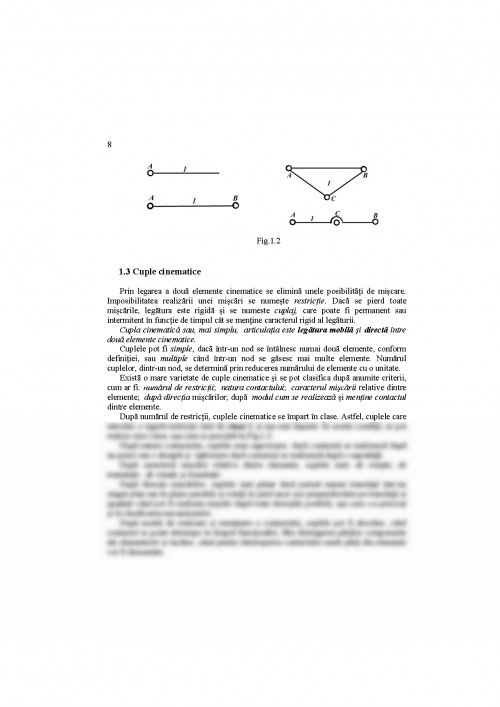
Din punct de vedere structural, mecanismul poate fi definit ca o insiruire de ele-mente cinematice, legate intre ele prin legaturi mobile si directe, numite cuple cinematice, formand contururi cinematice inchise. Unul dintre aceste elemente este fix, iar miscarea celorlalte elemente se raporteaza la elementul fix si este bine determinata de miscarea elementului conducator. Insiruirea de elemente, legate prin cuple cinematice, se numeste lant cinematic.
Mecanismele se clasifica dupa diverse criterii si pot fi: plane, cand elementele ci-nematice au miscari de translatie, intr-un plan sau in plane paralele si miscari de rotatie in jurul unor axe perpendiculare pe planele de translatie; spatiale, cand miscarile au loc in diferite plane; cu bare articulate sau cu legaturi permanente rigide care, de regula, sunt cuple cinematice inferioare; cu suprafete profilate sau cu cuple superioare; cu contacte indirecte, cand intre anumite elemente se introduc curele, cabluri sau lanturi.
Studiul mecanismelor consta in realizarea unor analize pe mecanisme existente si a sintezei unor mrcanisme noi, prin preluarea, in mod critic, a rezultatelor diverselor ana-lize efectuate in baza unor teme de proiectare. Analizele pot fi: numerice; pozitionale; structurale; cinematice; cinetostatice; dinamice. De cele mai multe ori, analizele numerice se includ in analizele structurale iar cele pozitionale in analizele cinematice.
Sinteza are ca scop determinarea lungimilor, tuturor elementelor cinematice, dupa care urmeaza stabilirea formelor constructive si a sectiunilor critice din conditii de rezistenta. De regula, forma constructiva si calculul de rezistenta se realizeaza in cadrul cursului Organe de Masini sau la cursurile de specialitate care se ocupa cu proiectarea unor utilaje tehnologice, specifice unor directii de specializare.
Aceasta lucrare, in prima parte, se ocupa cu analiza si sinteza mecanismelor plane cu bare articulate cu elemente rigide. Aceste mecanisme sunt utilizate foarte mult, in diverse domenii de activitate, cum ar fi: constructia de masini destinata domeniului mecanic, textil, metalurgic, energetic, chimic; utilaje electro-casnice; constructii civile si industriale; mecanica fina cu aplicatii in constructia aparatelor de masura si control, din toate domeniile de activitate; mecatronica cu aplicatii in tehnica de calcul, roboti si miniroboti.
Utilizarea, acestor mecanisme, se bazeaza pe unele avantaje certe, cum ar fi: durabilitate ridicata; siguranta in exploatare; realizarea unor legi de miscare complexe;
7
constructie, relativ simpla in anumite cazuri. Ca mecanism fundamental, in studiul mecanismelor cu bare articulate, se considera mecanismul patrulater, format din patru elemente lagate prin patru cuple de rotatie. Prin diverse procedee de transformare rezulta o gama variata de mecanisme, cum ar fi: manivela piston; culisa oscilanta. Aceste mecanisme se pot analiza si studia cu elementele teoretice dezvoltate la mecanismul patrulater plan.
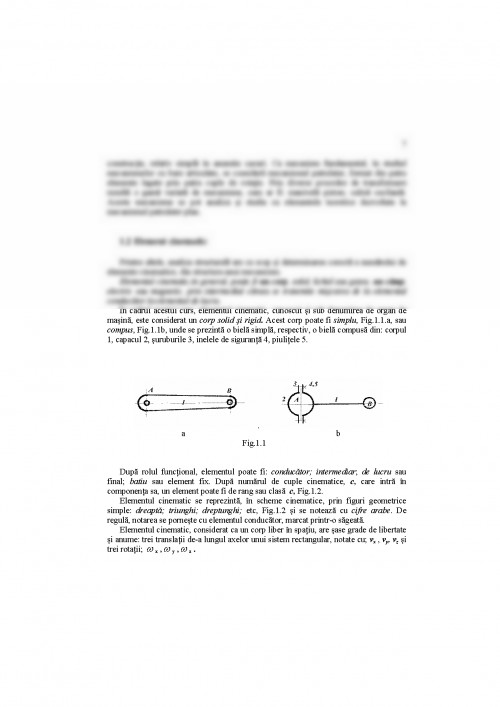
1.2 Element cinematic
Printre altele, analiza structurala are ca scop si determinarea corecta a numarului de elemente cinematice, din structura unui mecasnism.
1.Alexandru, P., Visa, I., Alexandru, C., Talaba, D. - Proiectarea functionala a
mecanismelor. Editura Lux Libris, Brasov, 1998.
2.Al-Sabeeh, A. K. - Double Crank External Geneva Mechanism. Transaction of
the ASME, Vol.115, September, 1993.
3.Artobolevski,I.,I. - Mehanizmi v sovre mennoi tehnika, Izd. Nauka, Moskva,
1987, tomIV
4.Aurite,T.,s.a. - Mecanisme cu cruce de Malta. Elemente de proiectare
tehnologica, Constructia de masini, Materiale, Nr.6, Bucuresti, 1988.
5.Balchanowski, J.K.,s.a. - Asymmetric coupler curves for the jerk free
intermittent motion. IFToMM Congress, Milano, 1995,Vol.I.
6.Balan,St.- Probleme de mecanica. Editura Didactica si Pedagogica, Bucurrsti,
1977.
7.Beletchii, V.I., Harlamov, S.V. - Rascet I consruirovanie torgovo
tehnologicescogo oborudovaniea. Masinostroenie, Leningrad, 1972.
8.Bogdan,R.C.,s.a. - Sinteza mecanismelor plane articulate. Editura Didactica si
Pedagogica, Bucurrsti, 1982.
9.Buculei,M.,s.a.- Metode de calcul in analiza mecanismelor cu bare. Editura
Scrisul Romanesc, Craiova, 1986.
10.Cernavskii, G M., s.a. - Proectirovanie mehaniceskih peredaci. Masinostroenie,
Moscova, 1976.
11.Chisiu, A., Matiesan, D., Madarasan, T., Pop, D., - Organe de masini. E.D.P.,
Bucuresti, 1981, Editia a II-a.
12.Demian,T. - Elemente constructive de mecanica fina. Editura Didactica si
Pedagagica, Bucuresti, 1974.
13.Demian, T. - Elemente de mecanca fina. E.D.P., Bucuresti, 1976.
14.Demian, T.,Tudor,D.,Grecu,E. - Mecanisme de mecanica fina. Editura Didactica
si Pedagogica, Bucuresti, 1982.
15.Demian,T., Tudor, D., Curita,I., Nitu,C. - Bazele proiectarii aparatelor de
mecanica fina. Editura Tehnica, Bucuresti, 1986, Vol.I si II.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.