

1. Introducere
Integrarea actuatoarelor constituie o alta forma de integrare hardware
(componente) in sistemele mecatronice.
Modul de definire a actuatorului, ca si componenta indispensabila sistemului
mecatronic, este extrem de larg cu unele aspecte comune. O reprezentare schematica a
functiei unui actuator este data in figura 14.1.
Fig.14. 1 Reprezentarea schematica a functiei unui actuator
O prima clasificare a actuatoarelor poate lua in considerare doua clase,
pornind de la principiul de functionare:
- Actuatoare clasice / conventionale
- Actuatoare speciale.
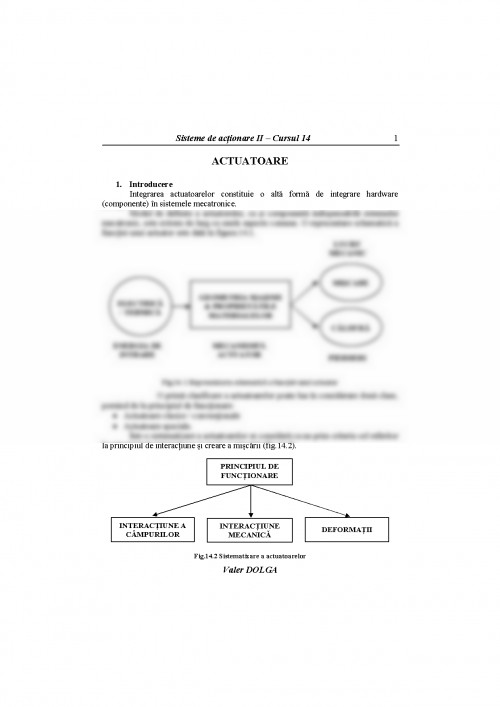
Intr-o sistematizare a actuatoarelor se considera ca un prim criteriu cel referitor
la principiul de interactiune si creare a miscarii (fig.14.2).
Fig.14.2 Sistematizare a actuatoarelor
ELECTRICA
/ TERMICA
ENERGIA DE
INTRARE
GEOMETRIA MASINII
& PROPRIETATILE
MATERIALELOR
MECANISMUL
ACTUATOR
MISCARE
CALDURA
LUCRU
MECANIC
PIERDERI
PRINCIPIUL DE
FUNCTIONARE
INTERACTIUNE A
CAMPURILOR
INTERACTIUNE
MECANICA
DEFORMATII
Sisteme de actionare II - Cursul 14
Valer DOLGA
2
Actuatoarele a caror functionare se bazeaza pe deformatii liniare sau
unghiulare au in componenta structurala materiale inteligente (smart materials):
materiale piezoelectrice, materiale electrostrictive si magnetostrictive, materiale
reologice, materiale cu memoria formei (sensibile termic), materiale sensibile pH,
materiale electrocromice (isi modifica proprietatile optice functie de tensiunea aplicata
pe materialul electrod) etc.
Componenta fundamentala a actuatorului este traductorul. Traductorul a fost
definit ca un dispozitiv care transforma energia neelectrica in energie electrica sau
invers. Traductorul a fost definit si ca un dispozitiv care transforma o forma de energie
in alta: energia cinetica de translatie in energie cinetica de rotatie sau invers.
In baza celor prezentate anterior si utilizand notiunea de port ? borna de intrare
si respectiv de iesire, un actuator poate fi asimilat cu o inseriere de doua traductoare cu
doua porturi: portul de intrare electric si portul de iesire mecanic (fig.14.3).
Fig.14.3 Mod de definire a unui actuator
Intr-o abordare asemanatoare, pornind de la notiunea de traductor, se poate
realiza o noua interpretare a notiunii de actuator. Astfel, se poate considera ca doua
tipuri de traductoare pot fi luate in considerare:
- Traductoare pe baza de caracteristici geometrice in care efectul de cuplaj intre
cele doua forme de energie - intrare si de iesire - se bazeaza pe formele geometrice ale
elementelor componente. Actuatoarele rezultate din aceasta categorie de traductoare
sunt denumite actuatoare geometrice. Este cazul tuturor actuatoarelor rotative.
- Traductoare pe baza de caracteristici de material in care fenomenul de
conversie intre formele de energie este direct utilizat pentru dezvoltarea actuatoarelor.
Exemple caracteristice: actuatoarele piezoelectrice, actuatoare cu memoria formei etc.
In functie forma energiei de intrare folosite pentru concretizarea functiei
actuatoare si implicit pe baza principiului de conversie energetica, se pot distinge
categoriile:
ACTUATOR
T RADUCTOR
A
TRADUCTOR
B
PORT
NEELECTRIC
PORT
ELECTRIC
PORT
MECANIC
f1 f2 f3
v1 v2 v3
Sisteme de actionare II - Cursul 14
Valer DOLGA
3
- Conversia termomecania. In acest caz energia de intrare este din domeniul
termic iar cea de iesire este energie mecanica.
- Actuatoarele pe baza de materiale cu memoria formei (AMMS) (pe baza de
transformare de faza) asigura controlul fortei intr-o plaja larga, comparabila
cu alte variante de actuatoare. In plus, proiectarea simpla a schemei de
control asigura posibilitatea de miniaturizare, consum energetic redus, etc.
Clasa de aplicatii a acestor actuatoare este extrem de larga: microroboti,
echipamente medicale, sisteme de siguranta termice etc. In figura 14.4 se
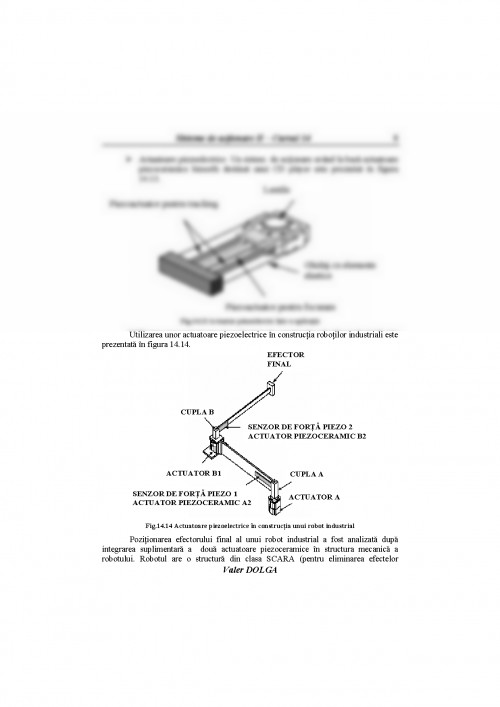
prezinta o aplicatie a acestor actuatoare pentru constructia unui efector final.
Fig.14.4 Actuator pentru efector final
- Actuatoare termice pe baza de structura compozita bimetalica.
AMMS
Flansa
efectorului
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.