
OBIECTIVELE DISCIPLINEI
-Cunoasterea structurii si a caracteristicilor generale ale sistemelor de actionare;
-Cunoasterea principalelor tipuri de motoare electrice si a caracteristicilor lor functionale;
-Conoasterea aparatajului electric general: rol,caracteristici functionale, simbolizare, utilizari;
-Cunoasterea principiilor de alcatuir a schemelor electrice pentru realizarea principalelor functiuni ale sistemului de actionare, cum sunt: pornire-oprire; inversarea sensului de miscare, reglarea turatiei, franarea;
-Metode si scheme tipice de realizare a principalelor functiuni cum sunt: pornire-oprire; inversarea sensului de miscare, reglarea turatiei, franarea, pentru principalele tipuri de motoare electrice;
-Principii de alegere a motoarelor electrice in concordanta cu cerintele impuse de masina de lucru.
STRUCTURA CURSULUI
Capitolul I: Probleme generale privind sistemele de actionare si elemente de mecanica actionarilor;
Capitolul II: Masini electrice de curent alternativ;
Capitolul III: Masini electrice de curent continuu
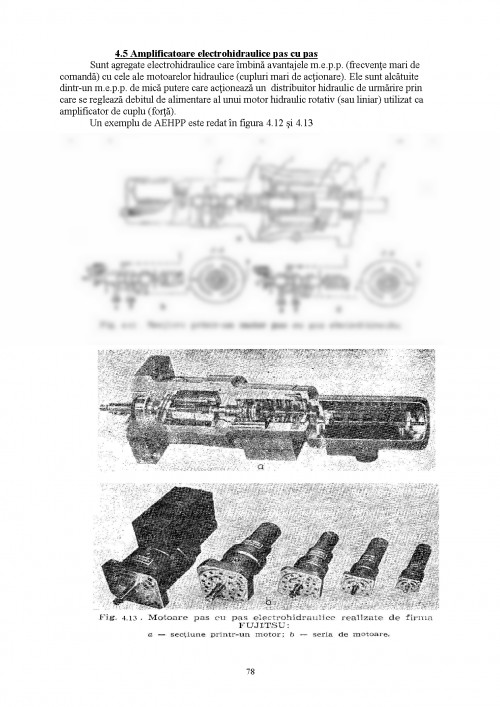
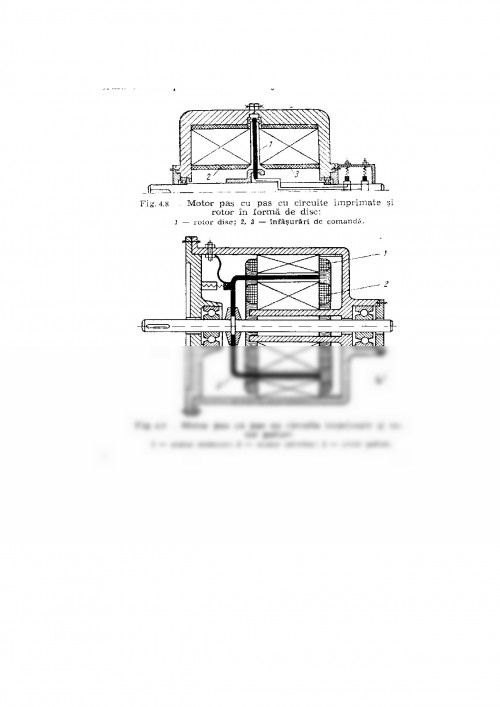
Capitolul IV:Motoare electrice pas cu pas.
TESTE DE AUTOEVALUARE
Test de autoevaluare la capitolul I
-Structura generala a unui Sistem Electric de Actionare Comanda si Reglare;
-Ecuatia fundamentala de miscare;
-Raportarea momentelor mecanice la un anumit arbore;
-Stabilitatea sistemelor de actionare;
Test de autoevaluare la capitolul II
-Motoare electrice de curent alternativ: clasificare, principii constructive;
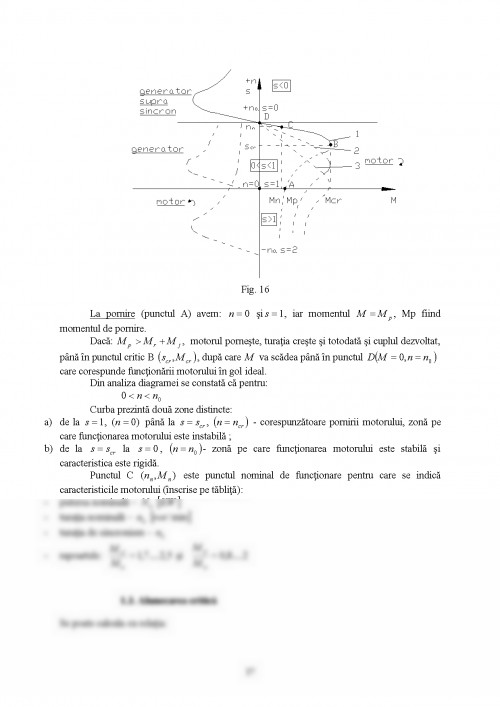
-Caracteristicile mecanice ale masinii asincrone trifazate;
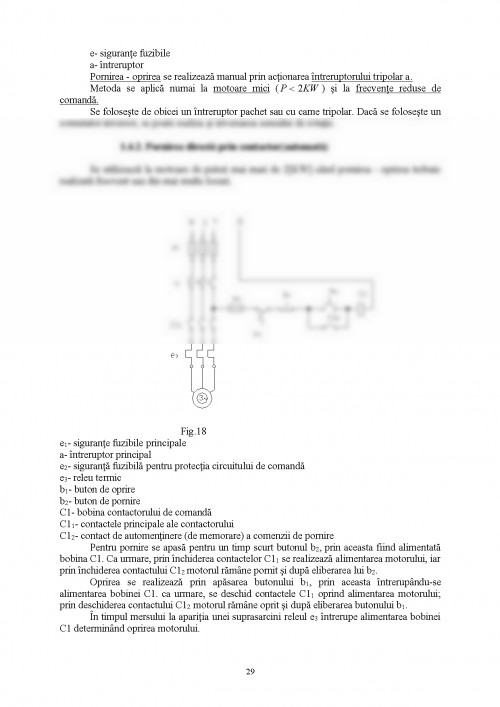
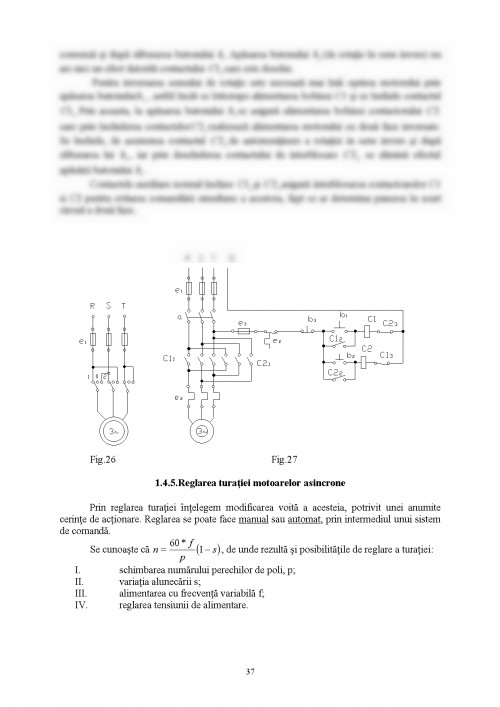
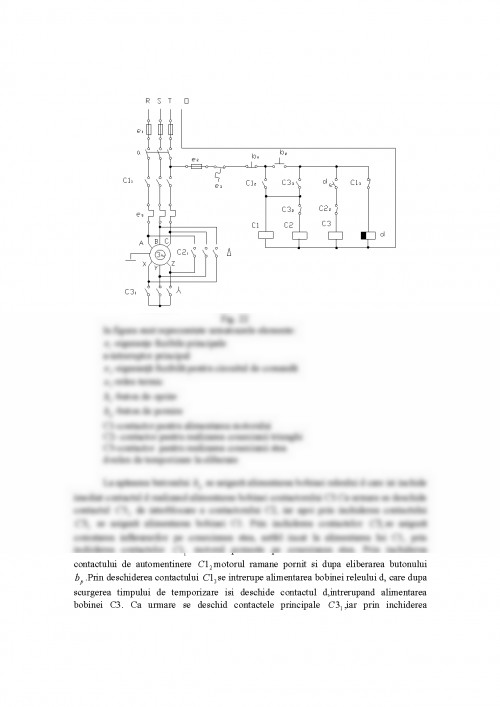
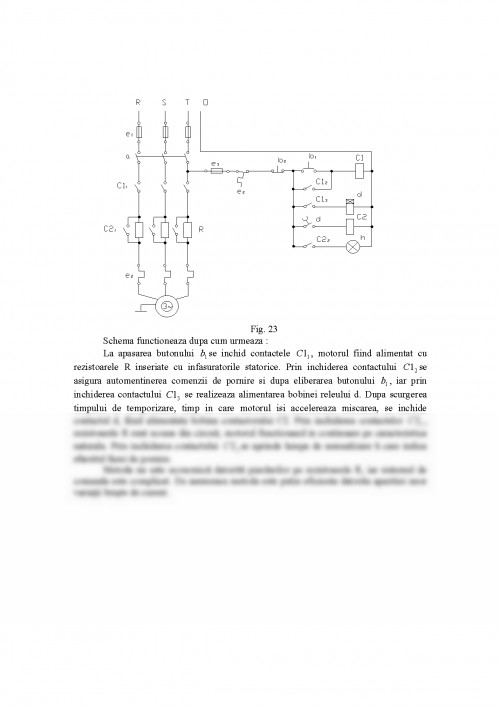
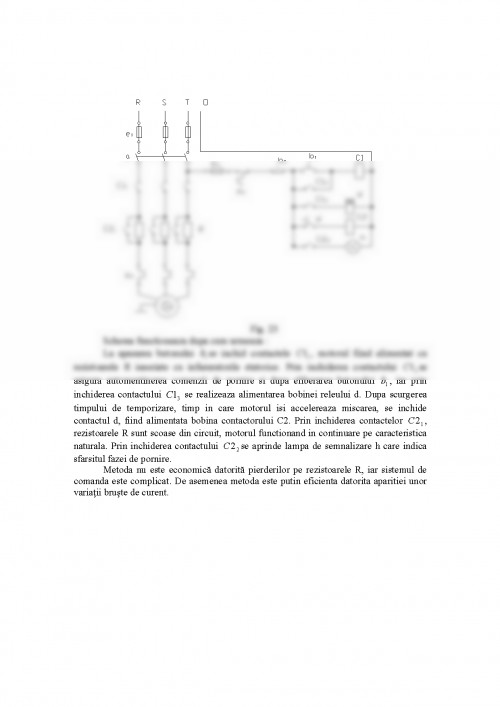
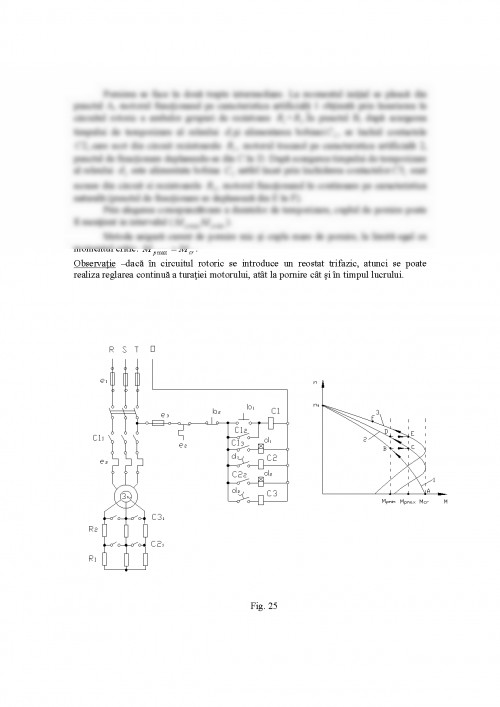
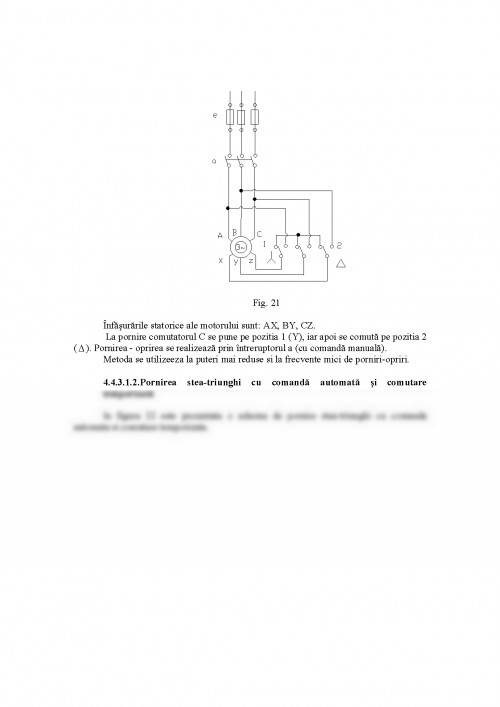
-Pornirea motoarelor asincrone trifazate: metode si scheme tipice;
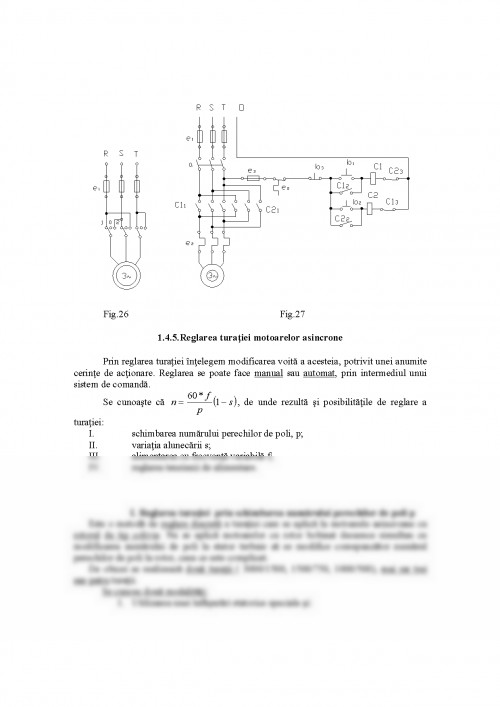
-Inversarea sensului miscarii:principiu si schema tipica;
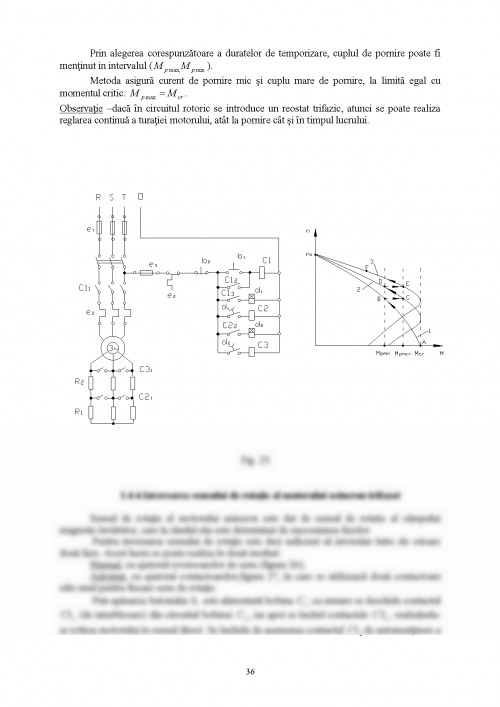
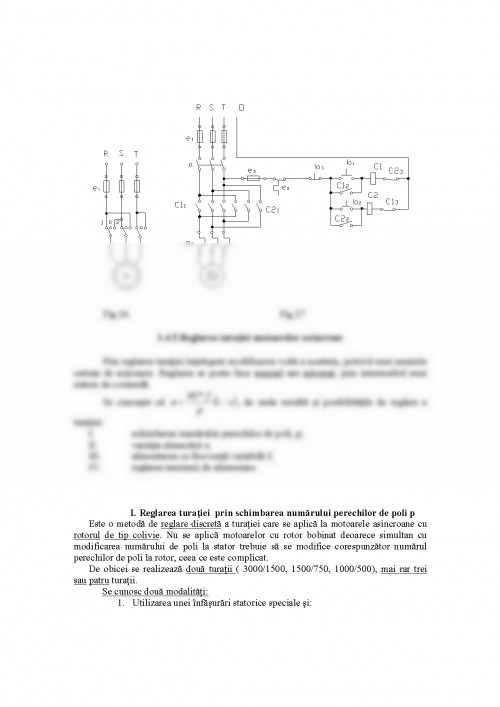
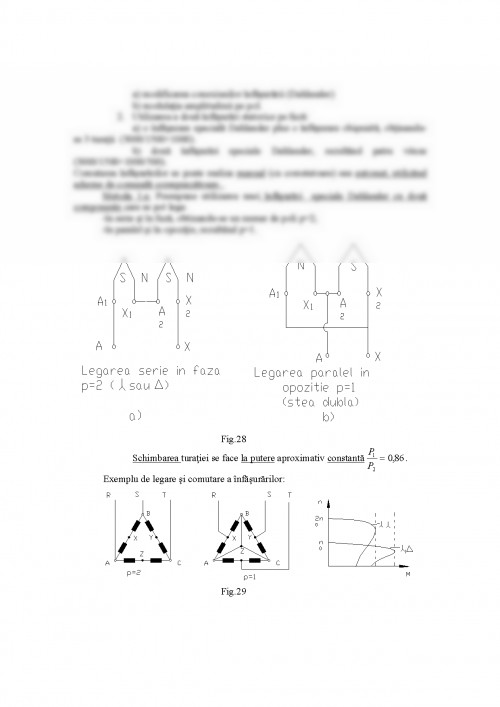
-Reglarea turatiei motoarelor asincrone trifazate: metode si scheme tipice;
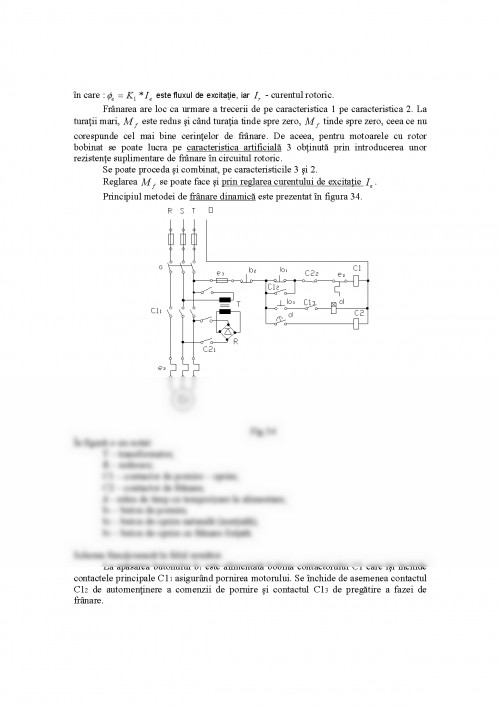
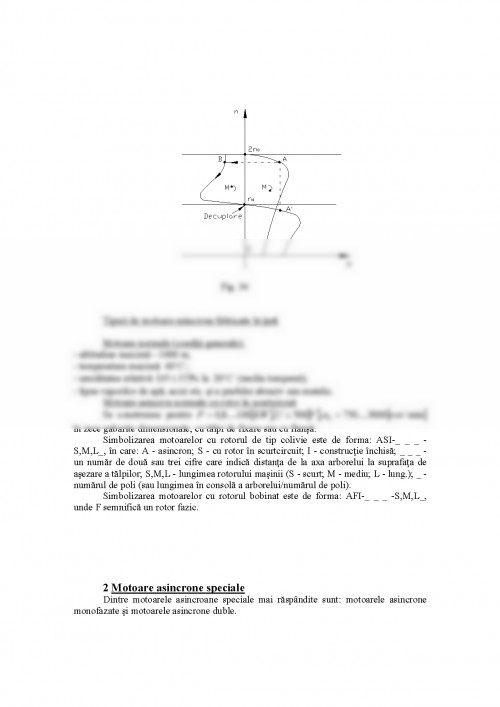
-Franarea motoarelor asincrone trifazate:metode si scheme tipice
Test de autoevaluare la capitolul III
-Masini electrice de curent continuu: clasificare, principii constructive si functionale;
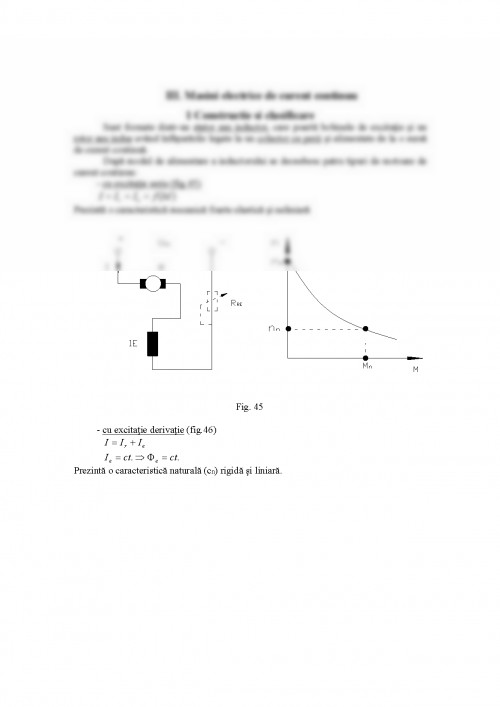
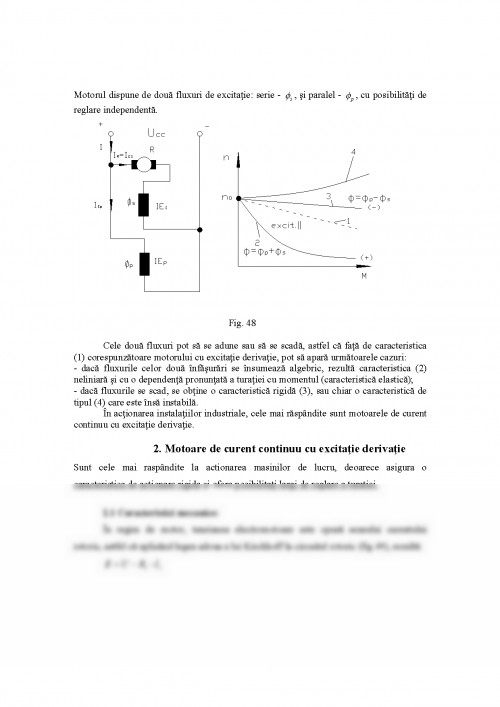
-Caracteristicile mecanice ale masinii de curent continuu cu excitatie derivatie;
-Pornirea motoarelor de current continuu: metode si scheme tipice;
-Inversarea sensului de rotatie:principiu si schema tipica;
-Reglarea turatiei motoarelor de crrent continuu: metode si scheme tipice;
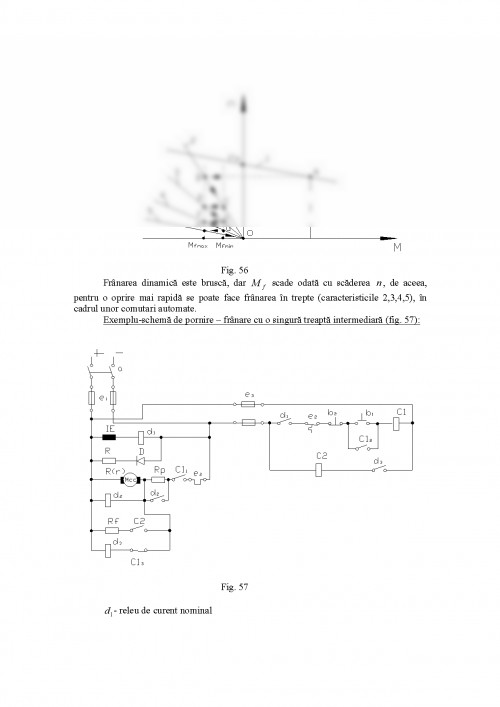
-Franarea motoarelor de curent continuu:metode si scheme tipice
CURS ACŢIONĂRI ELECTRICE
Capitolul I: Probleme generale privind sistemele de actionare si elemente de mecanica actionarilor;
1. Generalitati. Elemente de mecanica actionarilor
1.1Structura generala a unui Sistem Electric de Actionare Comanda si Reglare
Structura subsistemului electromecanic al unui sistem de acţionare electrică cuprinde următoarele elemente:
Fig. 1
ME- motorul electric de antrenare, de toate elementele aferente, care transformă energia electrică în energie mecanică;
T- transmisie mecanică- având rolul adaptării parametrilor energiei mecanice furnizate de motor la cerinţele de acţionare ale ML;
ML- maşina de lucru.
În funcţie de procesul tehnologic, ML impune anumite cerinţe sistemului de acţionare ca:
- natura mişcării – rotaţie - continuă
- alternativă
- pas cu pas
- translaţie- continuă
- alternativă
- pas cu pas
- reversibilitatea sensului mişcării;
- reglarea modulului (mărimii) mişcării;
- anumite caracteristici de pornire-oprire (inerţială sau cu frânare);
- o numită caracteristică mecanică ( ).
Alegerea corectă a ME şi a T se face ţinând cont de aceste cerinţe, anumite cerinţe fiind realizate de ME, iar altele de către transmisia mecanică T.
Dacă ME poate realiza toate cerinţele de acţionare, T poate lipsi, dar atunci schema electrică trebuie concepută ca atare.
Prin Sistem de Acţionare Electrică (SAE) înţelegem ansamblul de dispozitive care transformă energia electrică primită de la reţea în energie mecanică şi asigură controlul pe cale electrică a energiei mecanice astfel obţinute.
Părţile principale ale unui SAE sunt:
- subsistemul de forţă - alcătuit din unu sau mai multe motoare electrice şi aparatajul electric aferent (aparataj de forţă);
- subsistemul de comandă - care modelează energia mecanică dezvoltată de motor în concordanţă cu cerinţele tehnologice ale ML.
Cele mai complexe SAE sunt cele de comandă şi reglare.
Structura unui Sistem de Actionare Comandă şi Reglare evoluat este următoarea:
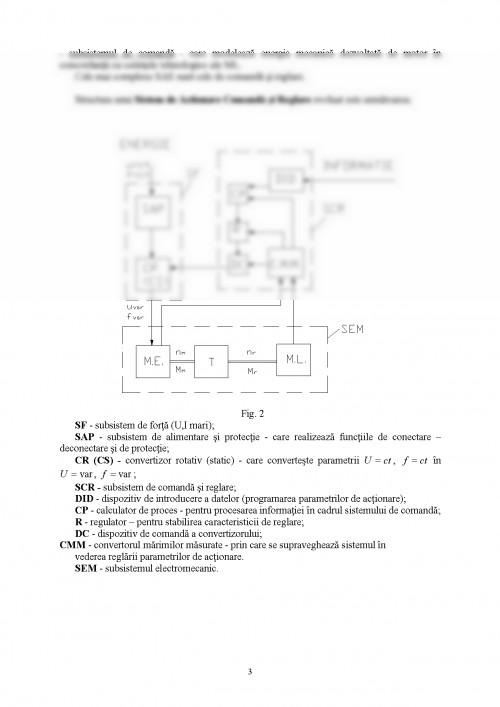
Fig. 2
SF - subsistem de forţă (U,I mari);
SAP - subsistem de alimentare şi protecţie - care realizează funcţiile de conectare –deconectare şi de protecţie;
CR (CS) - convertizor rotativ (static) - care converteşte parametrii , în , ;
SCR - subsistem de comandă şi reglare;
DID - dispozitiv de introducere a datelor (programarea parametrilor de acţionare);
CP - calculator de proces - pentru procesarea informaţiei în cadrul sistemului de comandă;
R - regulator – pentru stabilirea caracteristicii de reglare;
DC - dispozitiv de comandă a convertizorului;
CMM - convertorul mărimilor măsurate - prin care se supraveghează sistemul în
vederea reglării parametrilor de acţionare.
SEM - subsistemul electromecanic.
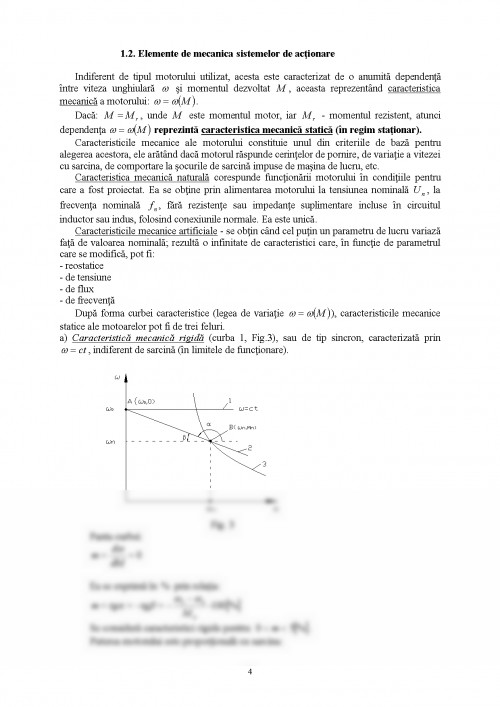
1.2. Elemente de mecanica sistemelor de acţionare
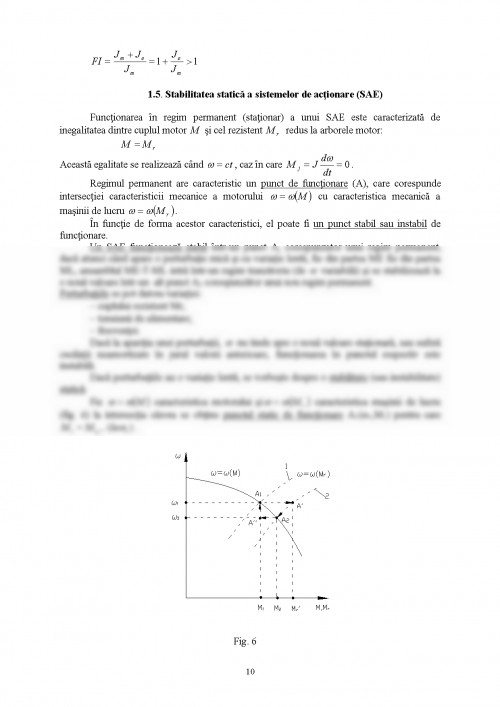
Indiferent de tipul motorului utilizat, acesta este caracterizat de o anumită dependenţă între viteza unghiulară şi momentul dezvoltat , aceasta reprezentând caracteristica mecanică a motorului: .
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.