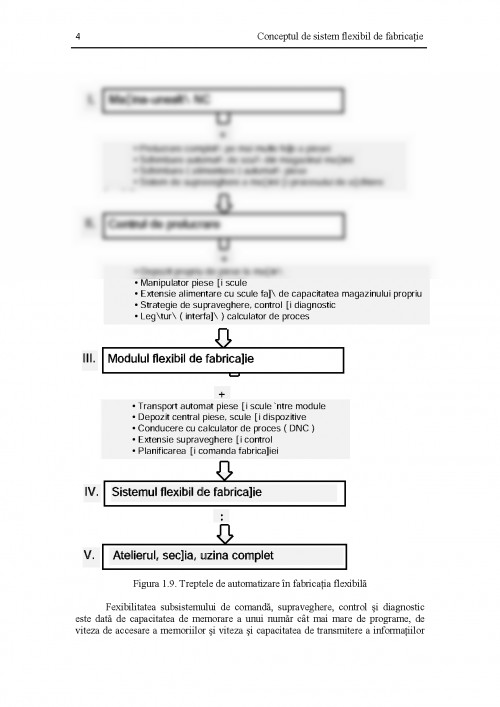
In conceptia si exploatarea SFF se cere realizarea dezideratului general ca sistemul sa fie atat de productiv cat se poate si atat de flexibil cat este necesar, ceea ce se poate obtine prin crearea unui echilibru controlat intre gradul de flexibilitate si de automatizare al sistemului.
Aprecierea globala a gradului de flexibilitate al unui SFF se poate face prin numarul tipurilor de piese ce se pot prelucra in cadrul sistemului. Totusi, acest mod de apreciere nu este exact deoarece nu ia in considerare aspectele calitative ale tipurilor de produse. Astfel, tipuri diferite de produse poate sa insemne uneori numai dimensiuni diferite ale unor piese cu forme similare, iar alte ori in grupa respectiva pot intra atat piese cu forma prismatica cat si piese de revolutie. Aceasta face necesar ca in stabilirea familiei de piese ce se prelucreaza in cadrul sistemului sa se aiba in vedere nu numai asemanarile geometrice ci si asemanarile tehnologice.
De altfel, in Japonia, capabilitatea de adaptare a sistemului la prelucrarea pieselor de acelasi tip ( carcase, roti dintate, axe ) este numita versatilitate, pe cand prin flexibilitate se intelege capabilitatea de adaptare la prelucrarea tipurilor diferite
2 Conceptul de sistem flexibil de fabricatie
de piese (prismatice + cilindrice ), insa asemenea sisteme sunt realizate intr-un numar foarte mic ( cca. 5% din totalul SFF realizate in lume).
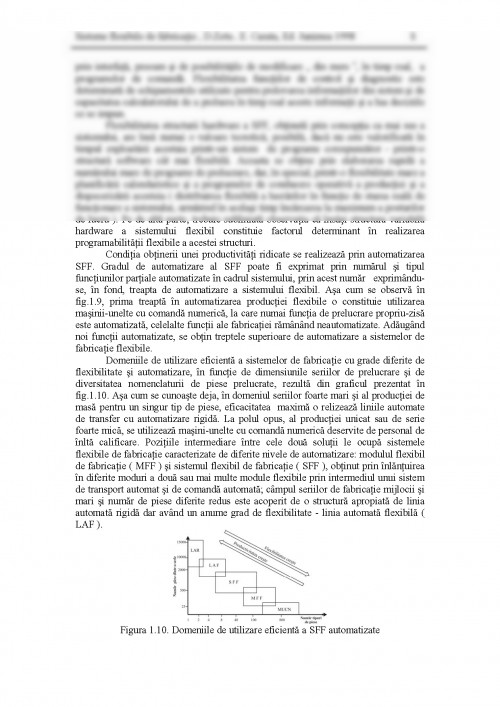
O apreciere mai precisa a gradului de flexibilitate al unui SFF se poate face prin numarul de stari diferite posibile ale sistemului, luand in considerare si timpul si cheltuielile necesare pentru a realiza adaptarea sistemului la starea noua.
In literatura de specialitate sunt date si relatii prin care se incearca sa se cuantifice gradul de flexibilitate al unui SFF. Consideram, insa, ca pentru proiectantul unui asemenea sistem, aceste relatii prezinta importanta minima. Pentru proiectant este, mai degraba, important sa cunoasca care sunt componentele fizice ale sistemului si ce cerinte trebuie sa satisfaca acesta pentru a obtine un anume grad de flexibilitate. Din acest punct de vedere, flexibilitatea unui SFF este determinata de doua componente importante:
a. Flexibilitatea structurii hardware a sistemului;
b. Flexibilitatea structurii software.
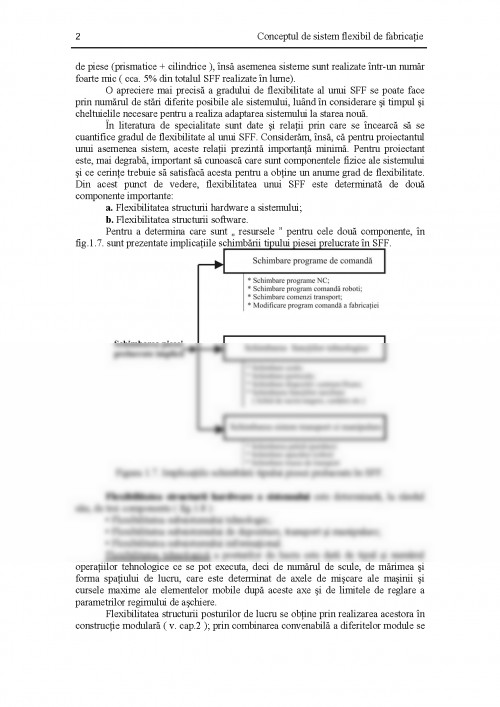
Pentru a determina care sunt ,, resursele " pentru cele doua componente, in fig.1.7. sunt prezentate implicatiile schimbarii tipului piesei prelucrate in SFF.
Figura 1.7. Implicatiile schimbarii tipului piesei prelucrate in SFF.
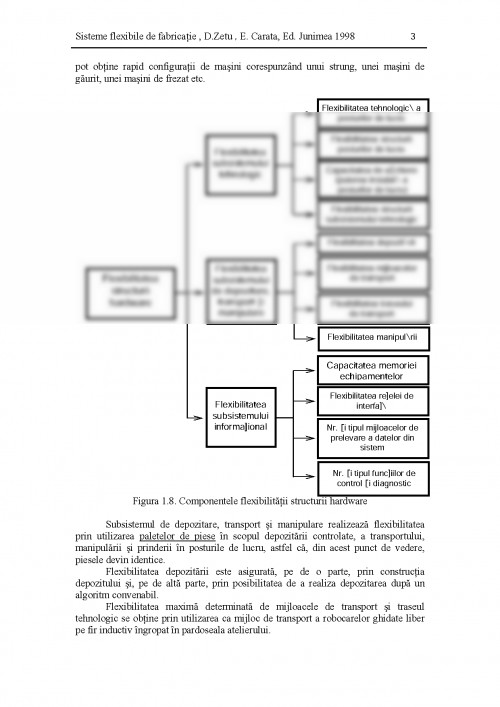
Flexibilitatea structurii hardware a sistemului este determinata, la randul sau, de trei componente ( fig.1.8 ):
- Flexibilitatea subsistemului tehnologic;
- Flexibilitatea subsistemului de depozitare, transport si manipulare;
- Flexibilitatea subsistemului informational.
Flexibilitatea tehnologica a posturilor de lucru este data de tipul si numarul operatiilor tehnologice ce se pot executa, deci de numarul de scule, de marimea si forma spatiului de lucru, care este determinat de axele de miscare ale masinii si cursele maxime ale elementelor mobile dupa aceste axe si de limitele de reglare a parametrilor regimului de aschiere.
Flexibilitatea structurii posturilor de lucru se obtine prin realizarea acestora in constructie modulara ( v. cap.2 ); prin combinarea convenabila a diferitelor module se
Sisteme flexibile de fabricatie , D.Zetu , E. Carata, Ed. Junimea 1998 3
pot obtine rapid configuratii de masini corespunzand unui strung, unei masini de gaurit, unei masini de frezat etc.
Figura 1.8. Componentele flexibilitatii structurii hardware Flexibilitatea tehnologic- aposturilor de lucru Flexibilitatea structurii posturilor de lucru Capacitatea de a[chiere (puterea instalat- a posturilor de lucru) Flexibilitatea structurii subsistemului tehnologic Flexibilitatea depozit- rii Flexibilitatea mijloacelor de transport Flexibilitatea traseului de transport Flexibilitatea manipul- rii Capacitatea memoriei echipamentelor Flexibilitatea re]elei de interfa]- Nr. [i tipul mijloacelor de prelevare a datelor din sistem Nr. [i tipul func]iilor de control [i diagnostic Flexibilitateasubsistemuluitehnologic Flexibilitatea subsistemuluide depozitare, transport [i manipulare Flexibilitateasubsistemului informa]ionalFlexibilitatea structurii hardware
Subsistemul de depozitare, transport si manipulare realizeaza flexibilitatea prin utilizarea paletelor de piese in scopul depozitarii controlate, a transportului, manipularii si prinderii in posturile de lucru, astfel ca, din acest punct de vedere, piesele devin identice.
Flexibilitatea depozitarii este asigurata, pe de o parte, prin constructia depozitului si, pe de alta parte, prin posibilitatea de a realiza depozitarea dupa un algoritm convenabil.
Flexibilitatea maxima determinata de mijloacele de transport si traseul tehnologic se obtine prin utilizarea ca mijloc de transport
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.