Capitolul 1
INTRODUCERE
ÎN PROBLEMATICA
SISTEMELOR DE CONDUCERE
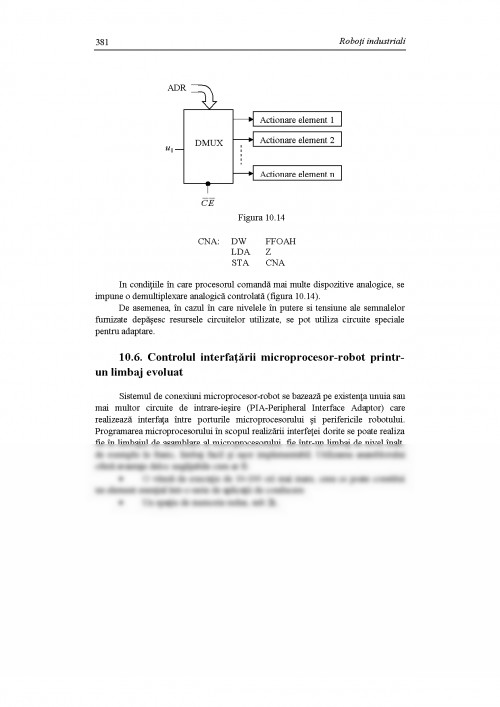
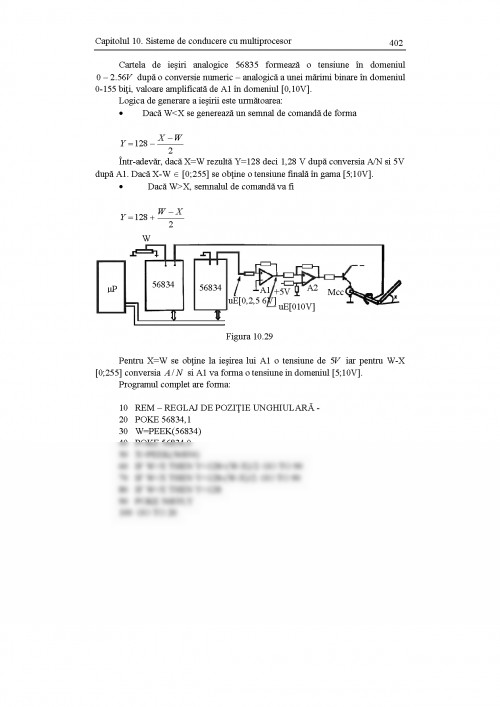
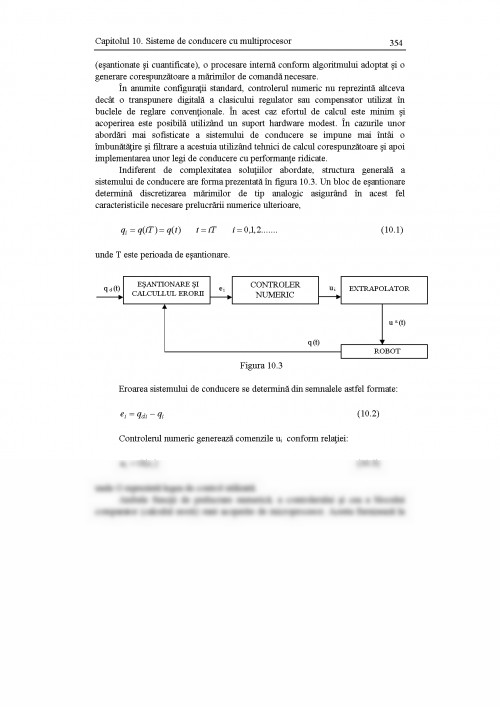
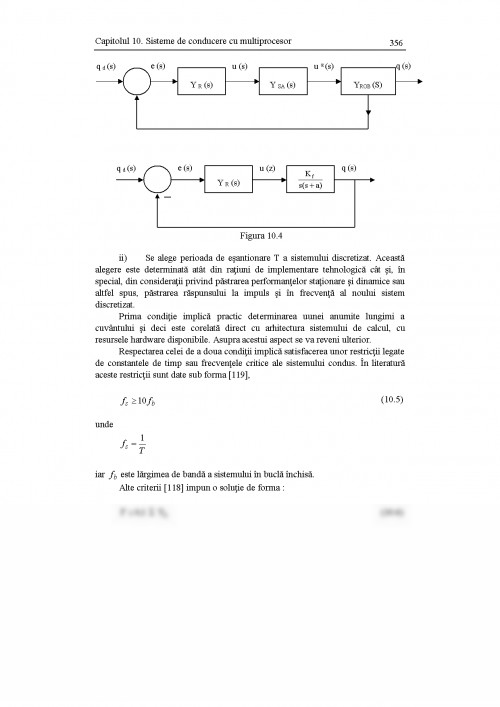
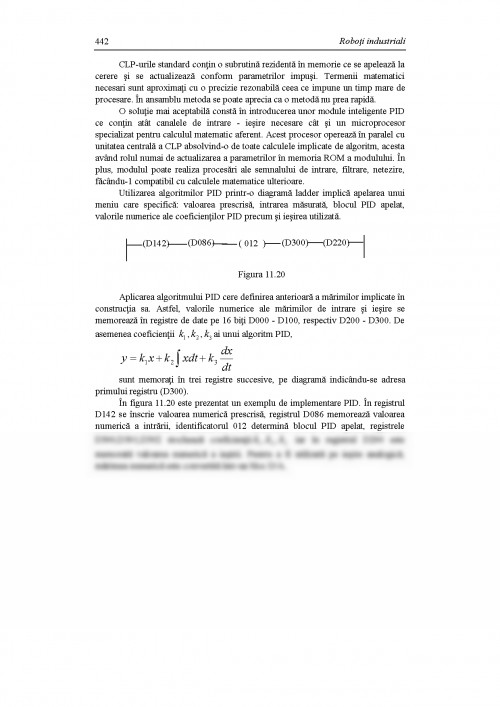
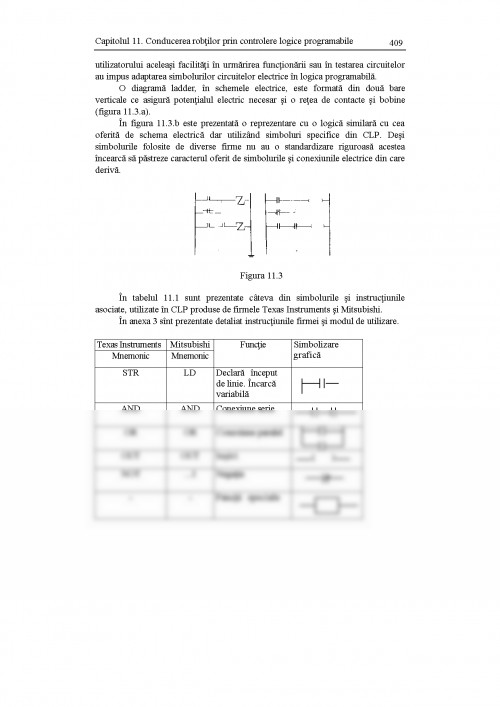
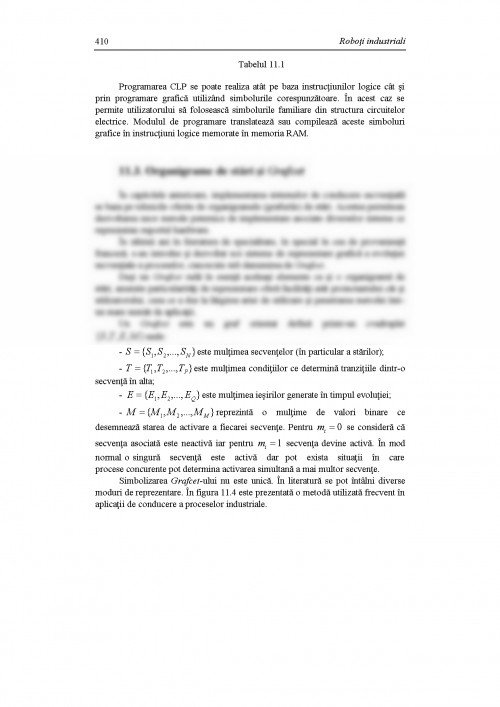
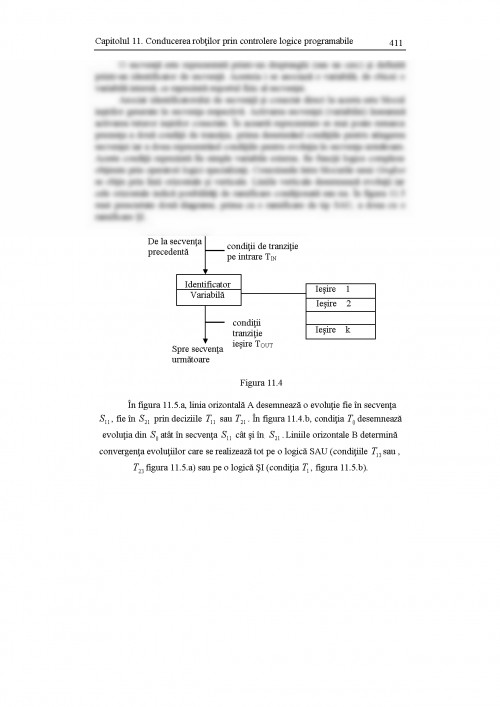
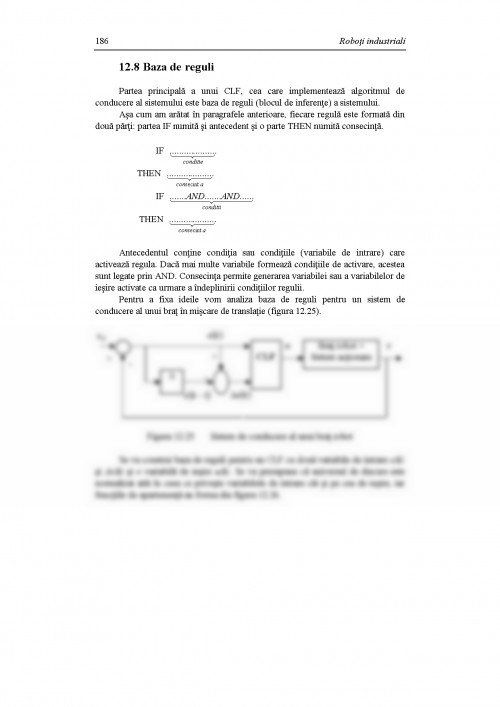
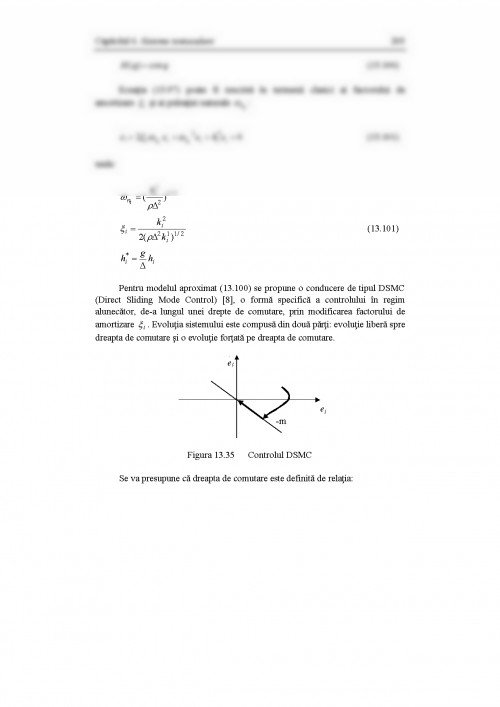
Robotul industrial reprezinta în momentul de fata punctul de intersectie al rezultatelor de vârf într-o serie de domenii: mecanica, automatica, calculatoare si sisteme de actionare. Aceasta congruenta a unor ramuri stiintifice si tehnologice atât de diferite se explica prin complexitatea deosebita a robotului, atât sub raportul arhitecturii mecanice, cât si în ceea ce priveste sistemul de conducere.
Propriu-zis, robotul este rezultatul firesc al evolutiei de la masinile unelte automatizate, masinile cu comanda program, liniile automate de fabricatie etc. în momentul în care rigiditatea si inflexibilitatea acestora nu a mai corespuns cerintelor actuale de productivitate si calitate, iar omul a încercat sa execute actiuni directe, nemijlocite asupra proceselor capatând un rol de supraveghere si control.
Deci robotul, ca rezultat al acestor dezvoltari tehnico - stiintifice, poate fi definit ca un sistem tehnologic capabil sa înlocuiasca sau sa asiste omul în exercitarea unor actiuni diverse asupra masinilor sau liniilor de productie.
În acest context, apare evidenta complexitatea problemelor privind atât constructia si actionarea robotilor cât si, în special, conducerea lor.
1.1. Componentele fundamentale ale sistemului robot
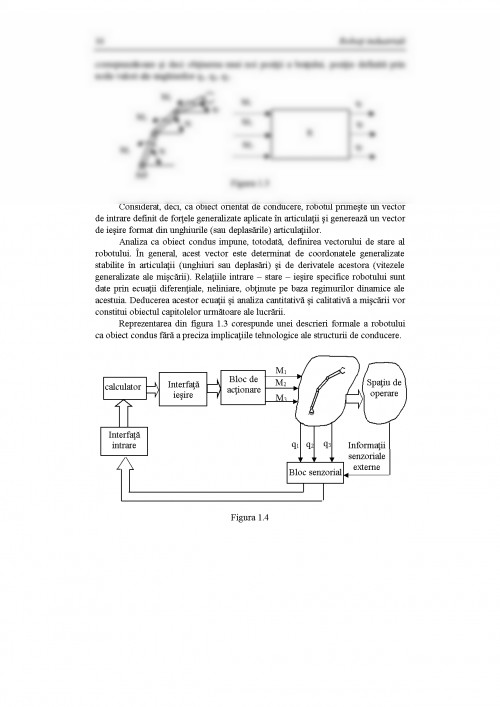
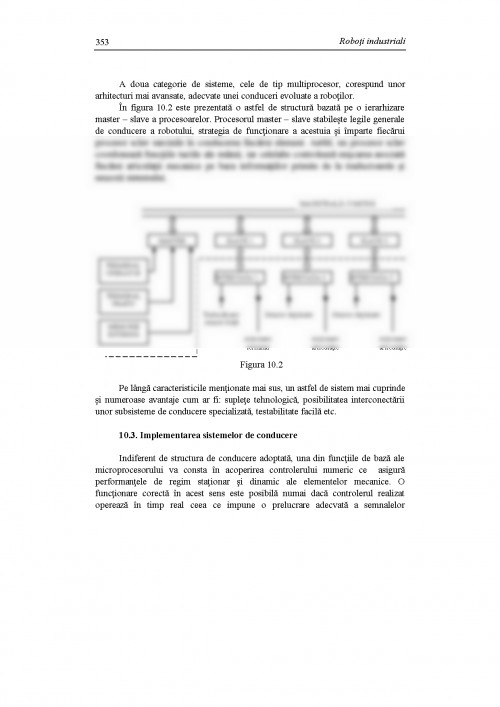
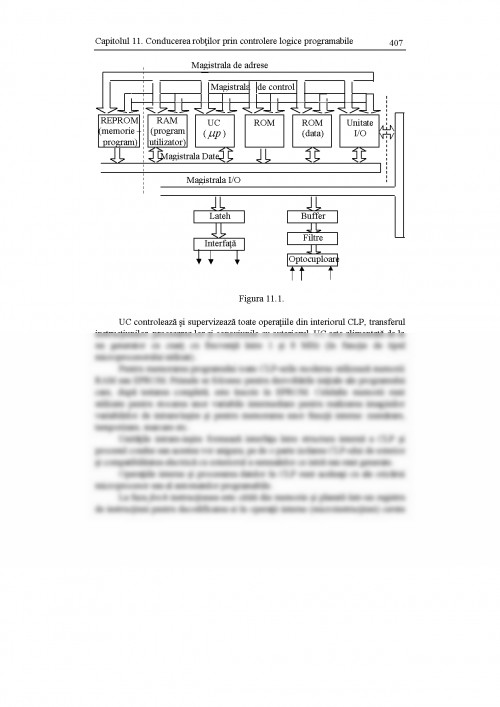
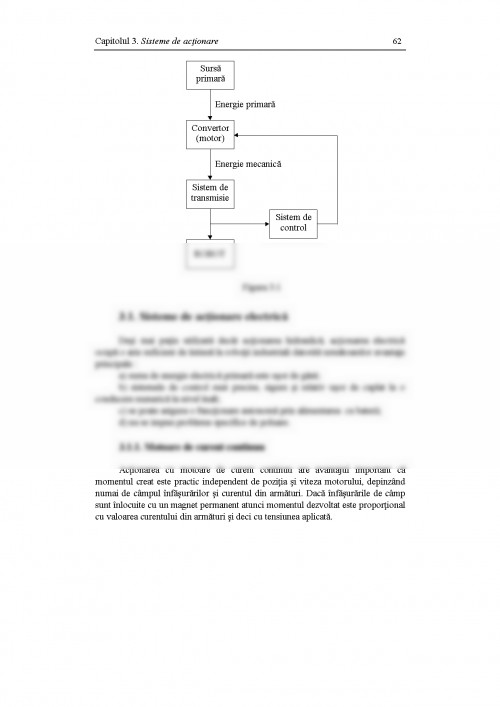
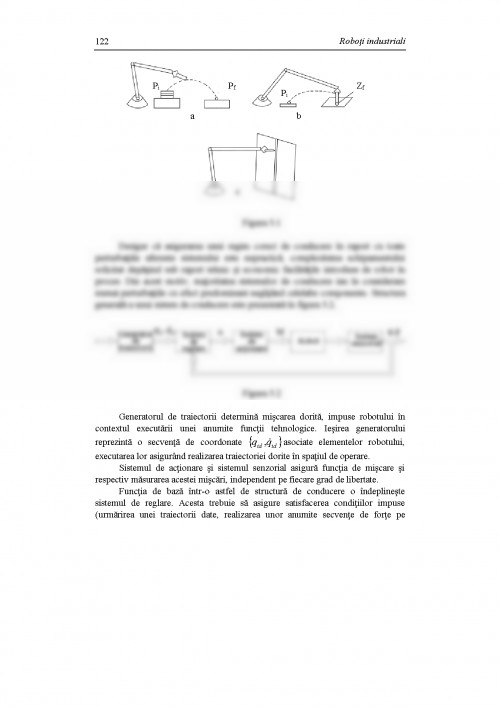
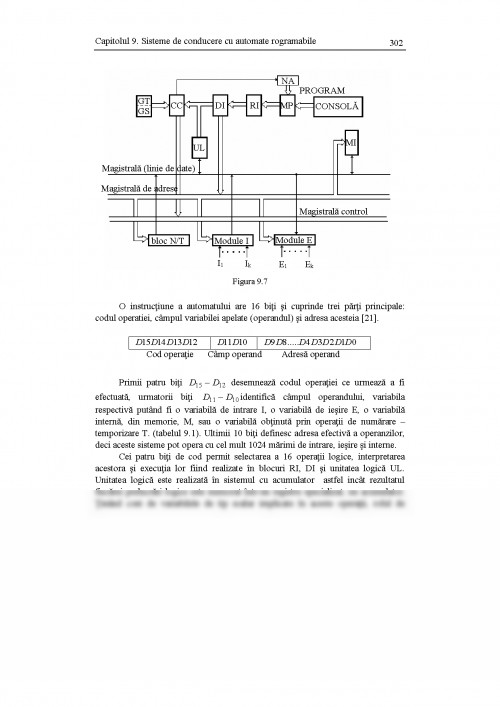
Privit în toata complexitatea sa, un sistem robotic cuprinde urmatoarele componente (figura 1.1) [1, 38]:
a) spatiul de operare;
b) sursa de energie
c) sursa de informatie
d) robotul.
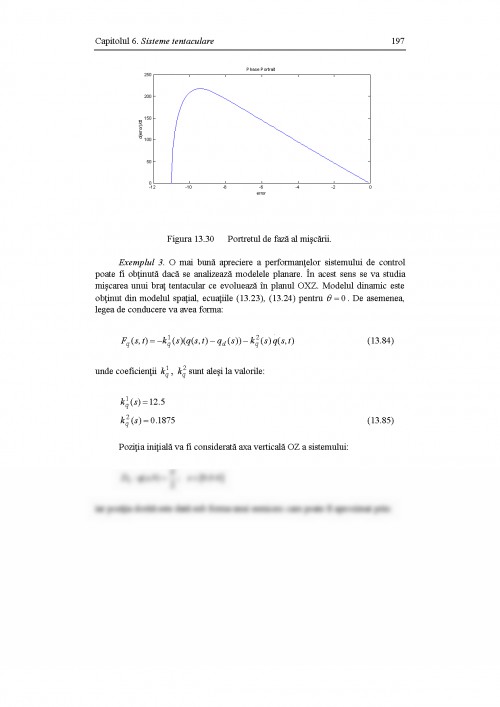
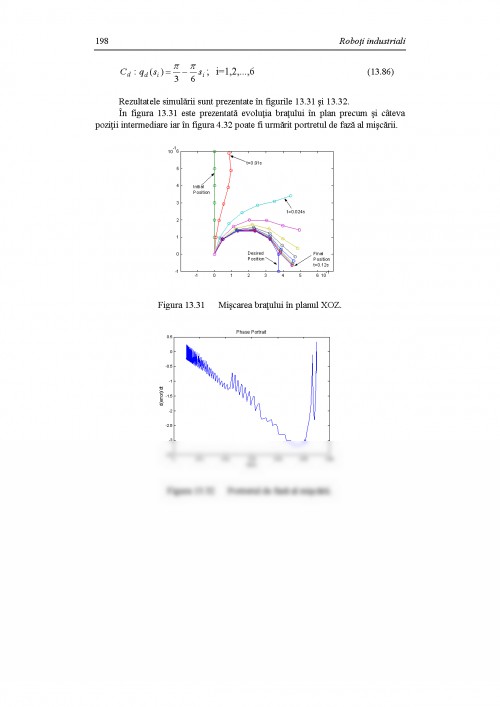
Figura 1.1
Spatiul de operare al unui robot este strâns legat de domeniul de lucru al acestuia, de gama aplicatiilor la care participa. Acest spatiu este definit direct de parametrii arhitecturii mecanice a robotului si este restrictionat pe de o parte de anumite caracteristici ale elementelor interne, mecanice, si pe de alta parte de caracteristicile obiectelor implicate în procesul tehnologic.
Sursa de energie constituie suportul energetic necesar pentru punerea în miscare atât a elementelor mobile ale robotului cât si pentru asigurarea alimentarii electrice a sistemului de actionare si a celui de conducere.
Sursa de informatie defineste modul de operare al robotului, caracteristicile de baza ale functionarii acestuia, structura algoritmilor de conducere în functie de specificul operatiei, de modul de prelucrare a informatiei de baza (în timp real sau nu) si de relatia robot - operator existenta în procesul de operare. Aceasta relatie poate determina functionarea automata, independenta, a robotului sau în asociere cu operatorul (de exemplu sistemele de teleoperare).
Robotul, componenta de baza a acestui sistem, este format din doua parti: unitatea de prelucrare a informatiei si unitatea operationala.
Unitatea de prelucrare a informatiei este un complex hardware-software ce primeste date privind instructiunile ce definesc operatiile executate, masuratori privind starea unitatii operationale, observatii asupra spatiului de operare al robotului, date pe baza carora determina în conformitate cu algoritmii de conducere stabiliti, deciziile privind modalitatea de actionare a unitatii operationale etc.
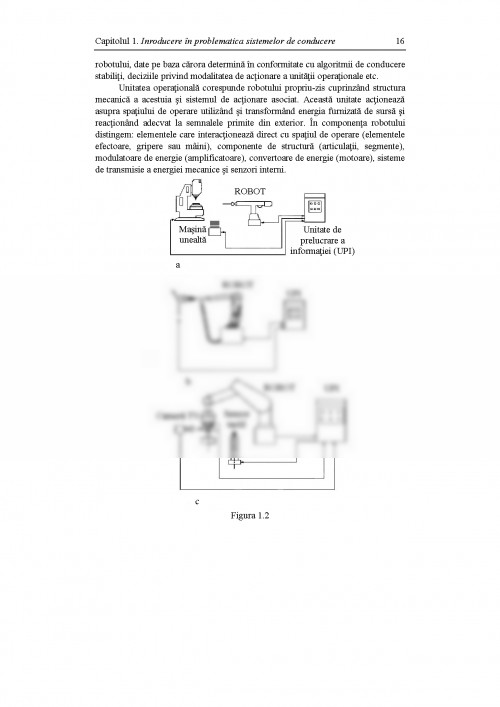
Unitatea operationala corespunde robotului propriu-zis cuprinzând structura mecanica a acestuia si sistemul de actionare asociat. Aceasta unitate actioneaza asupra spatiului de operare utilizând si transformând energia furnizata de sursa si reactionând adecvat la semnalele primite din exterior. În componenta robotului distingem: elementele care interactioneaza direct cu spatiul de operare (elementele efectoare, gripere sau mâini), componente de structura (articulatii, segmente), modulatoare de energie (amplificatoare), convertoare de energie (motoare), sisteme de transmisie a energiei mecanice si senzori interni.
Documentul este oferit gratuit,
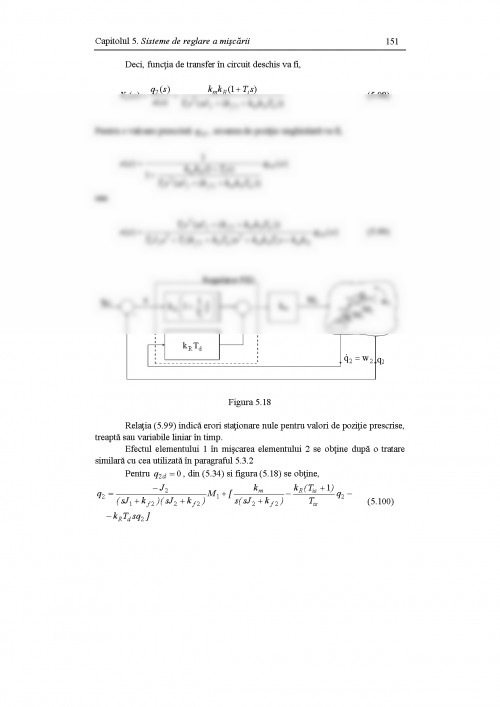
trebuie doar să te autentifici in contul tău.