Determinarea pozitiei se refera la obtinerea in urma unor observatii (masuratori) satelitare efectuate in puncte de interes, a coordonatelor (absolute sau relative) acestor puncte intr-un sistem de referinta bine precizat. Observatiile satelitare constau in diverse tipuri de masuratori efectuate intre receptorul satelitar aflat la sol sau in apropierea acestuia si unul sau mai multi sateliti ce evolueaza pe orbite circumterestre. Metodele de determinarea a pozitiei se bazeaza pe observatii efectuate utilizand semnale satelitare difuzate in domeniul microundelor. Fluxul de emisie al semnalului satelitar este de regula continuu sau poate fi prin impulsuri la intervale regulate de timp. Receptia acestor semnale se face in mod similar. Satelitii au un rol activ difuzand semnale care sunt receptionate de catre instrumente (receptoare) specializate care decodifica acest semnal. Dupa decodificarea semnalului din acesta sunt extrase informatiile necesare determinarii pozitiei receptorului.
Sistemele Satelitare de Navigatie Globala (GNSS) sunt sisteme care permit determinarea cu precizie ridicata a pozitiei intr-un sistem de referinta geocentric, in orice punct situat pe suprafata terestra, in apropierea sau exteriorul acesteia, folosind sateliti artificiali ai Pamantului. In momentul de fata cele mai cunoscute sisteme GNSS sunt sistemele NAVSTAR-GPS (SUA) si GLONASS (Rusia). Intre cele doua sisteme GNSS nu exista mari diferente in ceea ce priveste principiile de functionare si tehnologia utilizata. Fiecare sistem include trei segmente: segmentul spatial (satelitii), segmentul de control (statii de monitorizare si control) si segmentul utilizatorilor. Satelitii GNSS transmit utilizatorilor informatii de timp, informatii de navigatie si mesaje de stare ale sistemului. Segmentul de control este responsabil cu mentinerea in functiune a constelatiei de sateliti, a sistemului de timp atasat si determinarea orbitelor satelitilor. In prezent exista si alte tari care intentioneaza sa realizeze sisteme GNSS(complementare).
NAVigation Satellites with Time And Ranging - Global Positioning System (NAVSTAR - GPS)
Segmentul spatial GPS cuprinde un numar de 32 de sateliti dispusi pe 6 plane orbitale inclinate la 55? la o altitudine de 20230 km. Perioada de revolutie a satelitilor este de 11 ore si 56 de minute. O constelatie satelitara identica poate fi observata dupa o zi siderala cu 4 minute mai devreme. Constelatia GPS este compusa din satelitii GPS Block IIR - Replacement (inlocuiesc satelitii GPS Block II/IIA din 1997), GPS Block IIR - M (Modernizat - introducerea unui nou semnal militar - cod M, pe ambele unde purtatoare si a codului C/A pe a doua unda purtatoare denumit L2C), GPS Block IIF- Fallow On (introducerea unui nou semnal pe o a treia frecventa, L5) si GPS Block III (un nou semnal civil , codul C/A pe unda purtatoare L1). Precizia de pozitionare pentru segmentul civil a crescut de la aproximativ 100m pana la 13 m prin suspendarea tehnicii SA (Selective Availability). Progrese majore se asteapta prin modernizarea segmentului spatial (a treia unda purtatoare L5, codul C/A pe unda purtatoare L2 s.a.). Sistemul de referinta utilizat este WGS84 (World Geodetic System 1984).
GLObalnaya NAvigatsionnaya Sputnikovaya Sistema - GLObal NAvigation Satellite System (GLONASS) Segmentul spatial GLONASS cuprinde un numar de 24 de sateliti dispusi pe 3 plane orbitale inclinate la 64,8? la o altitudine de 19100 km. Perioada de revolutie a satelitilor este de 11 ore si 16 minute. Din cei 24 de sateliti proiectati momentan functioneaza un numar de 16 sateliti. Fiecare satelit are implementat un ceas atomic care genereaza o frecventa din care sunt formate cele doua unde purtatoare. Semnalele transmise sunt similare sistemului GPS , inclusiv codul C/A pe purtatoarea L2. Nivelul de precizie al sistemului rusesc GLONASS este comparabil cu cel al sistemului NAVSTAR-GPS. In Romania sistemul GLONASS poate fi utilzat, el completand constelatia sistemului GPS. Sistemul de referinta utilizat este PZ90. Galileo Uniunea Europeana (UE) si Agentia Spatiala Europeana (European Space Agency) vor dezvolta sistemul european GNSS, denumit Galileo. Constelatia sistemului Galileo va fi compusa dintr-un numar de 30 de sateliti dispusi pe 3 plane orbitale inclinate la 56? la altitudinea de 23616km. Perioada de revolutie a unui satelit va fi de aproximativ 14.4 ore.
In ceea ce priveste precizia de pozitionare, disponibilitatea si integritatea, Galileo va fi superior celorlalte sisteme. GALILEO va fi interoperabil cu NAVSTAR-GPS si GLONASS. Sistemul de referinta si coordonate utilizat va fi de tip ETRS (European Terrestrial Reference System). ROMPOS(R) utilizeaza pentru pozitionare sistemele globale NAVSTAR-GPS si GLONASS. La darea in functiune a noului sistem european Galileo, ROMPOS(R) va implementa utilizarea si a acestui nou sistem GNSS.
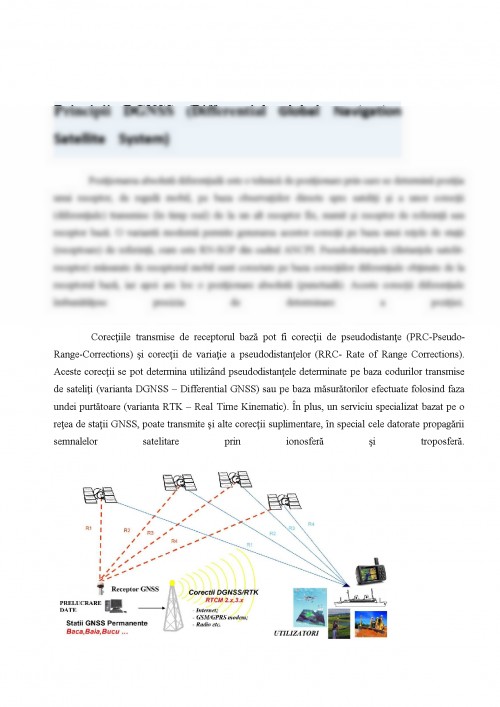
Principii DGNSS (Differential Global Navigation Satellite System)
Pozitionarea absoluta diferentiala este o tehnica de pozitionare prin care se determina pozitia unui receptor, de regula mobil, pe baza observatiilor directe spre sateliti si a unor corectii (diferentiale) transmise (in timp real) de la un alt receptor fix, numit si receptor de referinta sau receptor baza. O varianta moderna permite generarea acestor corectii pe baza unei retele de statii (receptoare) de referinta, cum este RN-SGP din cadrul ANCPI. Pseudodistantele (distantele satelit-receptor) masurate de receptorul mobil sunt corectate pe baza corectiilor diferentiale obtinute de la receptorul baza, iar apoi are loc o pozitionare absoluta (punctuala). Aceste corectii diferentiale imbunatatesc precizia de determinare a pozitiei. Corectiile transmise de receptorul baza pot fi corectii de pseudodistante (PRC-Pseudo-Range-Corrections) si corectii de variatie a pseudodistantelor (RRC- Rate of Range Corrections). Aceste corectii se pot determina utilizand pseudodistantele determinate pe baza codurilor transmise de sateliti (varianta DGNSS - Differential GNSS) sau pe baza masuratorilor efectuate folosind faza undei purtatoare (varianta RTK - Real Time Kinematic). In plus, un serviciu specializat bazat pe o retea de statii GNSS, poate transmite si alte corectii suplimentare, in special cele datorate propagarii semnalelor satelitare prin ionosfera si troposfera.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.