1. Sistem vibrant, SV
Sistemul vibrant este constituit din urmatoarele marimi:
o caracteristica inertiala, masa m[kg];
o caracteristica disipativa, coeficientul de amortizare vascoasa c [kgs-1];
caracteristica elastica, coeficientul de flexibilitate ? [mNsau coeficientul de rigiditate k[Nm-1
-1]
].
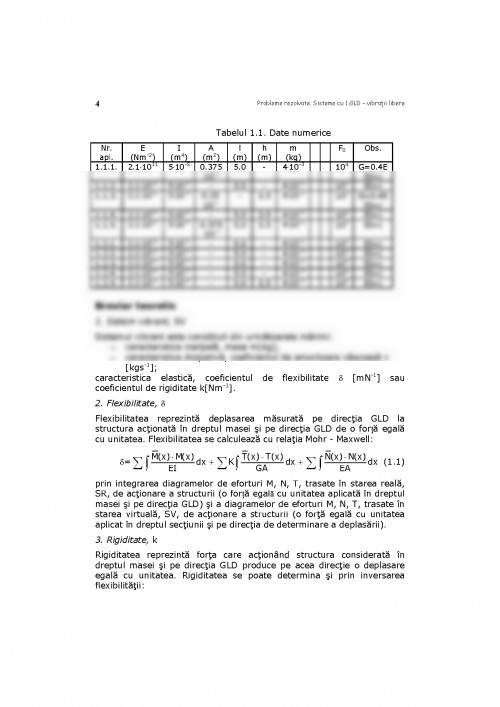
2. Flexibilitate, ?
Flexibilitatea reprezinta deplasarea masurata pe directia GLD la structura actionata in dreptul masei si pe directia GLD de o forta egala cu unitatea. Flexibilitatea se calculeaza cu relatia Mohr - Maxwell:
?= ? (1.1) ??????+?+?dxEA)x(N)x(NdxGA)x(T)x(TKdxEI)x(M)x(M
prin integrarea diagramelor de eforturi M, N, T, trasate in starea reala, SR, de actionare a structurii (o forta egala cu unitatea aplicata in dreptul masei si pe directia GLD) si a diagramelor de eforturi M, N, T, trasate in starea virtuala, SV, de actionare a structurii (o forta egala cu unitatea aplicat in dreptul sectiunii si pe directia de determinare a deplasarii).
3. Rigiditate, k
Rigiditatea reprezinta forta care actionand structura considerata in dreptul masei si pe directia GLD produce pe acea directie o deplasare egala cu unitatea. Rigiditatea se poate determina si prin inversarea flexibilitatii:
STABILITATEA SI DINAMICA CONSTRUCTIILOR 5
?1K= (1.2)
Rigiditatea se defineste si ca reactiunea din blocajul introdus pe directia GLD, in structura data si in care se produce o cedare egala cu unitatea. Conform acestei definitii, rigiditatea se poate calcula prin metodele Staticii Constructiilor.
4. Forte
Fortele care participa la echilibrul dinamic instantaneu, in cazul vibratiilor libere neamortizate ale unui SV, sunt:
o forta de inertie,
F&(1.3) i(t) = - m x& (t);
o forta elastica,
F (1.4) e(t) = kx(t);
in care:
x(t) reprezinta deplasarea masurata pe directia GLD;
x&&(t) reprezinta acceleratia sistemului.
5. Ecuatia de echilibru
Echilibrul dinamic instantaneu se exprima prin aplicarea principiului lui d?Alambert:
- Fi(t) + Fe(t) = 0 (1.5)
sau
- m x& & (t) + kx(t) = 0
Solutia ecuatiei de miscare de mai sus are forma:
x(t) = A sin(? t + ?) (1.6)
in care:
A = 2020???xV+?
?
??
reprezinta amplitudinea miscarii;
tg ? =
00V?x
apreciaza faza initiala a oscilatiei (?).
Conditiile initiale sunt: x0 si V0 (deplasarea si viteza la timpul t=0).
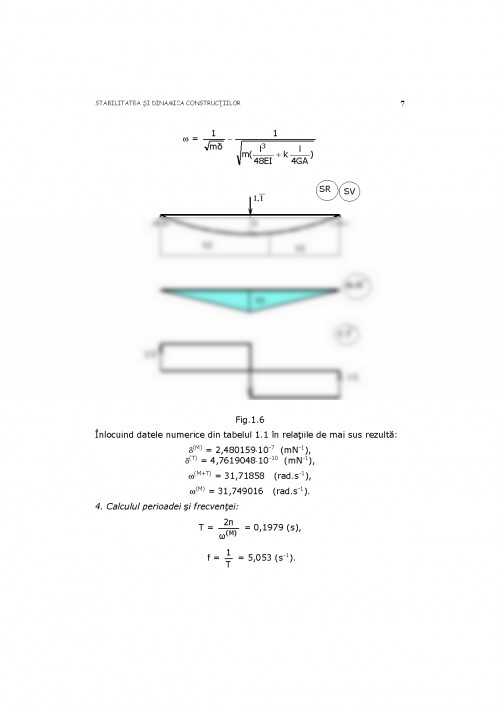
6. Pulsatia proprie, ?
1. Banut, V., Calculul neliniar al structurilor, Editura Tehnica, Bucuresti, 1981.
2. Banut, V., Popescu, H., Stabilitatea structurilor elastice, Editura Academiei R.S.R., Bucuresti, 1975.
3. Balan, St., Mihailescu, N. St., Istoria stiintei si tehnicii in Romania. Date cronologice., Editura Academiei R.S.R., Bucuresti, 1985.
4. Balan, St., s.a., Dictionar cronologic al stiintei si tehnicii universale, Editura Stiintifica si Enciclopedica, Bucuresti, 1979.
5. Barsan, G.M., Dinamica si stabilitatea constructiilor, EDP, Bucuresti, 1979.
6. Bigs, J.M., Introduction to Structural Dynamics, McGraw-Hill Books Company, New York, 1964.
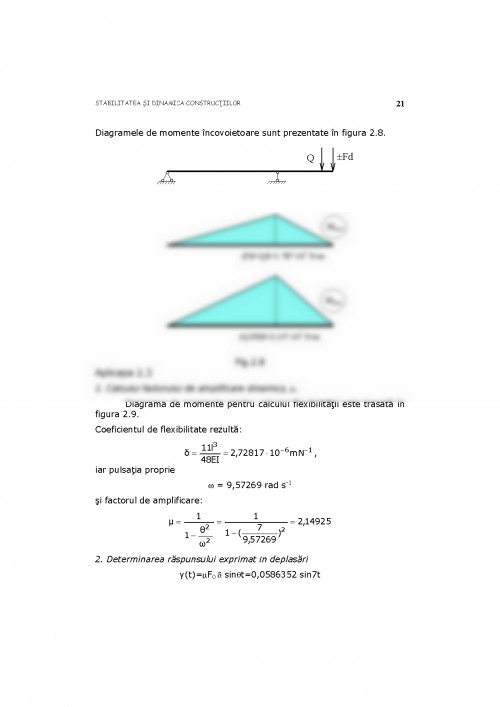
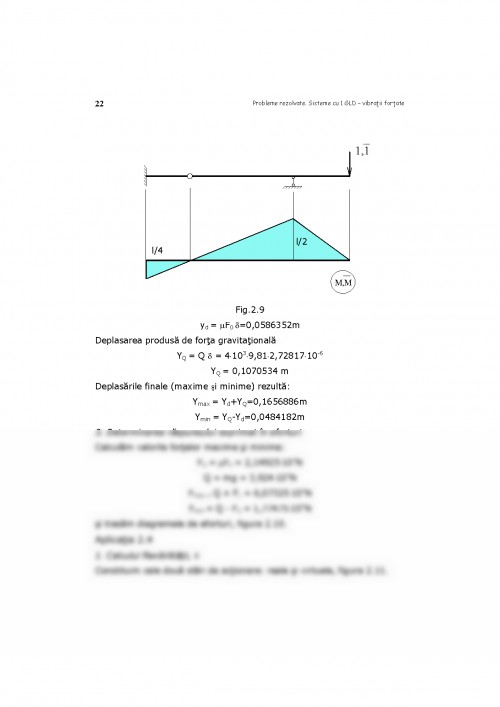
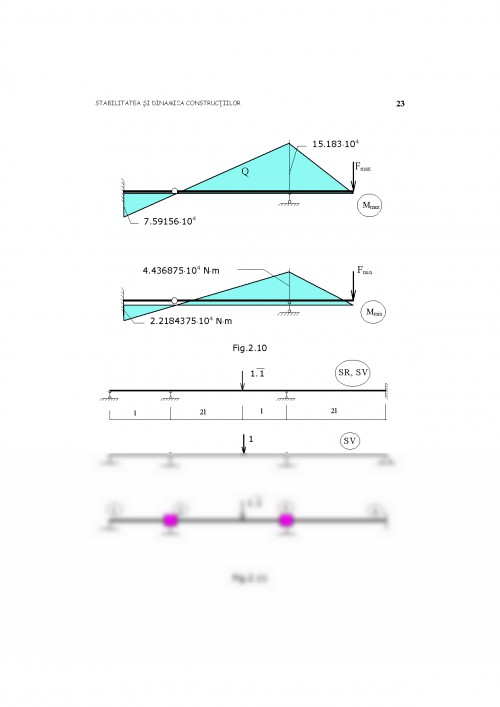
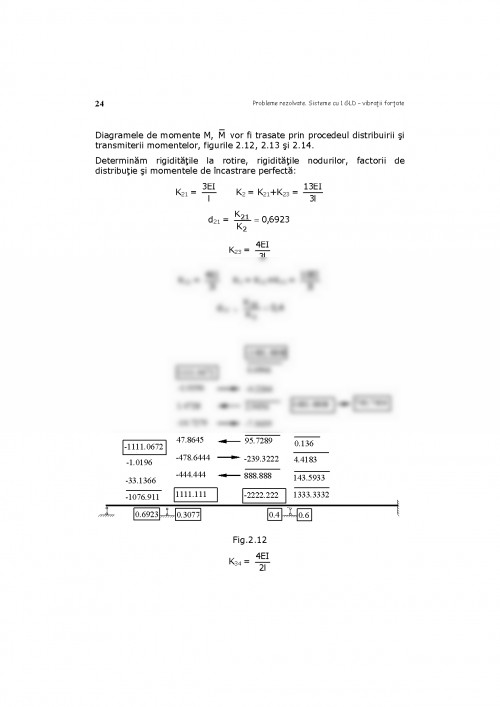
Bibliografie
92
7. Bratu, Polidor, Vibratiile sistemelor elastice, Editura Tehnica, Bucuresti, 2000.
8. Buzdugan, Gh., Fetcu, L., Rades, M., Vibratii mecanice, EDP, Bucuresti, 1979.
9. Buzdugan, Gh., Mihailescu El., Rades, M., Masurarea vibratiilor, Editura Academiei R.S.R., Bucuresti, 1979.
10. Buzdugan, Gh., Izolarea antivibratila a masinilor, Editura Academiei R.S.R., Bucuresti, 1980.
11. Buzdugan, Gh., Dinamica fundatiilor de masini, Editura Academiei R.S.R., Bucuresti, 1968.Silas, Gh. s.a., Culegere de probleme de vibratii mecanice, vol. I, Sisteme liniare cu un numar finit de grade de libertate, Editura Tehnica, Bucuresti, 1967.
12. Bratu, P.P., Izolarea si amortizarea vibratiilor la utilaje de constructii, INCERC Bucuresti, 1982.
13. Caracostea, A., s.a., Manual pentru calculul constructiilor, Vol.I, Bazele teoretice de calcul al constructiilor, Editura Tehnica, Bucuresti, 1977.
14. Chiriacescu, Sergiu T., Dinamica masinilor unelte. Prolegomene, Editura Tehnica, Bucuresti, 2004.
15. *** Culegere de probleme de mecanica, Editura Didactica si Pedagogica, Bucuresti, 1974.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.