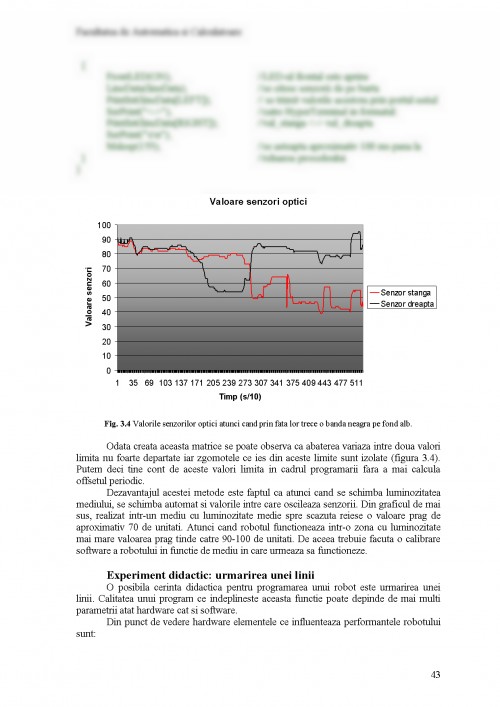

Dorinta de a crea masini care sa usureze munca este una dintre aspiratiile cele mai vechi ale speciei noastre. Aceasta se concretizeaza in zilele noastre in crearea de roboti cat mai asemanatori noua sau altor specii meniti atat sa preia sarcinile neplacuta cat si sa amuze sau sa tina companie. Desi se fac progrese majore, la toate nivelurile (hardware si software), suntem inca departe de a realiza ,,fiinte inteligente" pe alte cai decat cele biologice.
Definitie
Conceptual, un robot este un element artificial, virtual sau mecanic (real) capabil sa produca modificari in mediul in care exista. In practica, prin robot se intelege un sistem electro-mecanic ce poate indeplini o serie de sarcini atunci cand i se comanda sau prin programare prealabila.
Datorita numarului mare de ,,masini" ce se pot fi denumite ,,robot" este dificil de formulat o definitie generica, unanim acceptata pentru acest termen. Organizatia Internationala de Standardizare (ISO) da o definitie in standardul ISO 8373: "manipulator controlat automat, reprogramabil, multifunctional, programabil in trei sau mai multe axe, fie fix, fie mobil destinat utilizarii in automatizarile industriale". Aceasta definitie a fost adoptata de Federatia Internationala de Robotica , Reteaua Europeana de Cercetare in Robotica (EURON) si alte comitete internationale din domeniu.
Institutul American de Robotica (RIA) foloseste o definitie mai larga: ,,manipulator reprogramabil, multifunctional proiectat sa mute materiale, componente, unelte sau dispozitive speciale printr-o varietate de miscari programate pentru a mari performanta diferitelor sarcini". RIA imparte robotii in patru subcategorii: dispozitive de manevrat obiecte cu control manual, dispozitive automate de manipulare a obiectelor (cu program predefinit), roboti programabili sau cu servo-control ce urmeaza o traiectorie continua (point-to-point) si o ultima categorie de roboti ce achizitioneaza informatii din mediul inconjurator si raspund intr-un mod ,,inteligent".
Encyclopaedia Britannica defineste robotul ca fiind ,,orice masina cu operare automata ce preia din sarcinile umane, chiar daca nu seamana cu fiinta umana sau nu executa aceste functii in mod similar omului".
In Dictionarul Explicativ al Limbii Romane cuvantul robot este definit astfel: ,,Sistem automatizat care actioneaza pe baza unui program de lucru stabilit sau care reactioneaza la anumite influente exterioare, dand impresia executarii unor actiuni omenesti".
Nu exista nici o definitie unanim acceptata iar continua dezvoltare a roboticii nu ajuta la gasirea uneia. Din contra, apar tot mai multe intrebari: masina de spalat automata este un robot? Sunt organismele simple mai asemanatoare oamenilor decat robotii?
Etimologie
Cuvantul robot provine din limba slava (robota) unde are sensul de munca grea, munca silnica. Acest termen a fost folosit cu acest sens si pe teritoriul Romaniei. Carti aparute la inceputul secolului 20 descriu prin acest termen munca prestata de tarani catre proprietarii de terenuri cu un secol in urma. Acest termen este pastrat in dex si cu intelesul de ,,Persoana care munceste din greu si fara sa inteleaga rostul muncii sale; muncitor de corvoada".
Sensul de masina menita sa inlocuiasca muncile oamenilor provine din piesa de teatru science-fiction scrisa de cehul Karel Capek Rossum's Universal Robots (R.U.R.), publicata in 1920 si avand premiera in 1921 in Praga. Actiunea acesteia incepe intr-o fabrica ce produce ,,oameni artificiali" numiti roboti. Notiunea moderna de android este mult mai aproape de masinile din piesa deorece acestea sunt foarte asemanatoare oamenilor. Piesa a fost tradusa din ceha in engleza de catre Paul Selver, adaptata de Nigel Playfair in 1923 si produsa in londra in aprilie acelasi an de catre Basil Dean.
Exista o scurta scrisoare trimisa de Karel Capek catre Oxford English Dictionary in care acesta specifica faptul ca fratele sau, Josef Capek, este cel ce a denumit astfel personajele. In 1933 apare un articol in ziarul ceh Lidove noviny in care Karel spune ca denumirea aleasa de el pentru creaturile din piesa este labori (din latinescul labor=munca). Aceasta denumire nu i-a placut si a urmat sfatul fratelui sau alegand termenul ,,robot".
Cuvantul robotica (robotics) a fost introdus mai tarziu de Isaac Asimov in cartile sale science-fiction.
Scurta istorie
Robotica antica
In mitologie exista multe exemple de fiinte ce corespund conceptului modern de robot. Zeul Hephaestus (stapanul fierarilor, mestesugarilor, artizanilor, sculptorilor, metalelor, tehnicii, focului si vulcanilor) a facut slujitori mecanici, vorbitori din aur. In folclorul evreiesc exista golemul, fiinta vie creata numai din materie moarta. Un alt exemplu este statuia mitica a lui Pygmalion ce prinde viata.
In antichitate putem vorbi mai mult de niste masini automate decat de roboti in termenii de azi. Cea mai veche relatare legata de astfel de masinarii este porumbelul lui Archytas din Tarentum 428- 347 i.Hr. (Fig. 1.1). In scrierile lui Aulus Gellius, 5 secole mai tarziu, se spune ca Archytas este inventatorul primei masini zburatoare cu capacitatea de a se autopropulsa. Aceasta masina avea forma unei pasari iar la unul din experimente ea a zburat circa 200 de metri. Din pacate scrierile matematicianului grec referitor la acest dispozitiv nu au fost pastrate.
Fig. 1.1 Archytas din Tarentum; filozof, matematician, astronom si strateg grec.
O alta scriere din China, secolul trei i.Hr, vorbeste despre intalnirea dintre Regele
www.arexx.com
Siteul firmei Arexx, distribuitor de roboti si componente de robotica; site disponibil la 07.06.2009
www.k-team.com
Siteul firmei KTeam, distribuitor de roboti si componente de robotica; site disponibil la 07.06.2009
http://activrobots.com/
Siteul firmei Mobile Robots Inc, distribuitor de roboti si componente de robotica; site disponibil la 07.06.2009
http://world.honda.com/ASIMO/
Robotul Asimo (Honda); site disponibil la 07.06.2009
http://support.sony-europe.com/aibo/
Robotul Aibo (Sony); site disponibil la 07.06.2009
http://www.theoldrobots.com/
Roboti din anii 80; site disponibil la 07.06.2009
http://www.inteligenta-artificiala.ro/
Portal de inteligenta artificiala; site disponibil la 07.06.2009
http://www.agir.ro/univers-ingineresc/robotica___provocare_majora_a_mileniului_trei_1759.html
Siteul Asociatiei Generale a Inginerilor din Romania; site disponibil la 07.06.2009
http://academicearth.org
Site de expuneri online; site disponibil la 07.06.2009
http://en.wikipedia.org/wiki/Robot
http://en.wikipedia.org/wiki/History_of_robots
http://en.wikipedia.org/wiki/Biomimetic
http://en.wikipedia.org/wiki/Biomimetic
Enciclopedie online; site disponibil la 07.06.2009
http://www.npr.org/templates/story/story.php?storyId=16328789
Articol de robotica; site disponibil la 07.06.2009
http://www.conceptlab.com/roachbot/
Siteul de prezentare al proiectului "Cockroach Controlled Mobile Robot"; site disponibil la 07.06.2009
http://news.softpedia.com/news/What-Is-a-Robot-40608.shtml
Articol de robotica; site disponibil la 07.06.2009
http://www.physorg.com/news1193.html
Articol de robotica; site disponibil la 07.06.2009
http://www.sintef.no/Home/Information-and-Communication-Technology-ICT/Applied-Cybernetics/Projects/Our-snake-robots/Anna-Konda--The-fire-fighting-snake-robot
Siteul companiei sintef cu referire la un robot sarpe; site disponibil la 07.06.2009
http://biomech.media.mit.edu/research/research.htm
Siteul echipei BIO mechatronics, echipa de robotica de la MIT; site disponibil la 07.06.2009
http://www.snakerobots.com/S1.html
Proiect de robotica; site disponibil la 07.06.2009
Carti:
1.MAJA J. MATARIC: Interaction and intelligent behavior, MIT 1994
2.PAT LANGLEY: Intelligent behavior in humans and machines, Stanford, 2006
3.LATOMBE, J.-C.: Robot Motion Planning, Kluwer Academic Publishers, 1995.
4.MURPHY, R. R.: Introduction to AI Robotics, MIT Press, 2000.
5.PEARL, J.: Probabilistic Reasoning in Intelligent Systems, Palo Alto, Morgan Kaufmann, 1988.
6.BORANGIU, Th., A. HOSSU: Sisteme educationale in robotica, Editura Tehnica, Bucuresti, 1991.
7.NEVES, M. C., E. OLIVEIRA: A Control Architecture for an Autonomous Mobile Robot. in: Proceedings of Autonomous Agents 97, Marina Del Rey, California, USA, 1997, pp. 193-200.
8.SIMMONS, R., R. GOODWIN, K. Z. HAIGH, S. KOENIG, J. O'SULLIVAN: A Layered Architecture for Office Delivery Robots. in: Proceedings of Autonomous Agents 97, Marina Del Rey, California, USA, 1997, pp. 245-252.
9.ALDEA, N.: Sistem robot autonom de navigare, lucrare de licenta, Universitatea Petrol-Gaze din Ploiesti, Catedra de Informatica, 2004.
10.OPREA, M.: Path Planning in a Robot Navigation System. in: Proceedings of the 16th International Joint Conference on Artificial Intelligence IJCAI99 - workshop PLAN-2, Stockholm, Sweden, 1999, pp. 65-70.
11.EVERETT, H. R.: Sensors for Mobile Robots: Theory and Application, A. K. Peters Ltd, 1995.
12.RUSSEL, S., P. NORVIG: Artificial Intelligence - A Modern Approach, Prentice-Hall International, Inc., New Jersey, 1995.
13.STOUT, B.: The Basics of A* for Path Planning. in: Game Programming Gems, 2000, pp. 254-263.
14.STENTZ, A.: The Focussed D* Algorithm for Real-Time Replanning. in: Proceedings of the International Joint Conference on Artificial Intelligence - IJCAI95, 1995, pp. 1652-1659.
15.BELLMAN, R.: On a Routing Problem, Quarterly of Applied Mathematics, 16(1), 1958, pp. 87-90.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.