

Toate elementele componente ale sistemelor automate, indiferent de modul lor de functionare si de realizare constructiva, pot fi grupate intre ele dupa reactia lor la actionarea perturbatiilor, care conduc la schimbarea starii de echilibru si care este insusi procesul de reglare. Astfel, drept un element tip al sistemului automat este denumit elementul, care are o singura coordonata generalizata si poate fi descris de ecuatia ordinara diferentiala liniara de ordinul l sau 2 si care are o caracteristica de tranzitie tipica, in cazul sistemelor liniare dinamice SRA se poate remarca sase elemente tipice.
1) Elementul amplificator (proportional)
Este elementul tip in care raspunsul este descris de o ecuatie de forma a0 y = b0u unde a0? 0 si
b ? 0, y = y (t) = u (t) marimile semnalului de iesire si de intrare.
Notand k = b0 / a 0 expresia de legatura devine y = ku. Ecuatia de legatura in forma operationala va fi:
Y (P) = k U (P)
unde y = Y(P) si u = U (P).
Atunci functia de transfer va fi:
,
unde k este coeficientul de transfer sau de amplificare.
2) Elementul de intarziere (cu timp mort)
Este un element in care marimea de iesire reproduce unu la unu variatia marimii de intrare, numai deplasata in urma cu un timp t, numit timp mort.
Este descris de ecuatia cu argumentul intarziat:
y(t) = u (t-?).
Functia tranzitorie are expresia g (t) = 1 (t -?)
Functia de transfer este:
Raspunsul la frecare se obtine substituind in functia de transfer P = i?
unde: Re (?) = cos ??, Im (?)= - sin ??
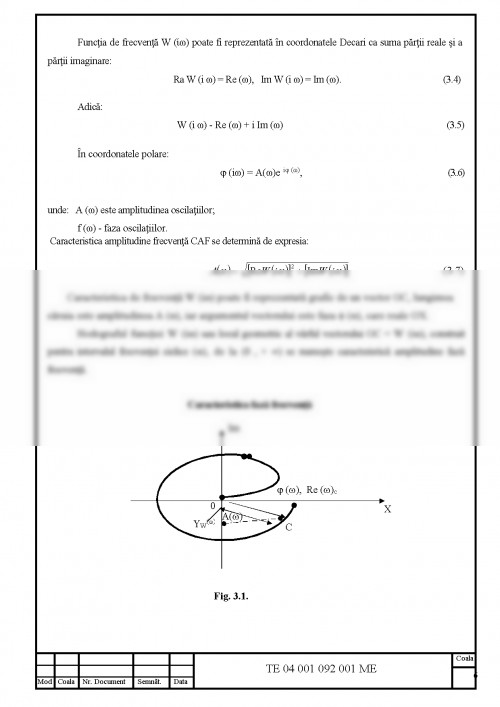
Caracteristica faza frecventa
Caracteristica amplitudine frecventa
sau
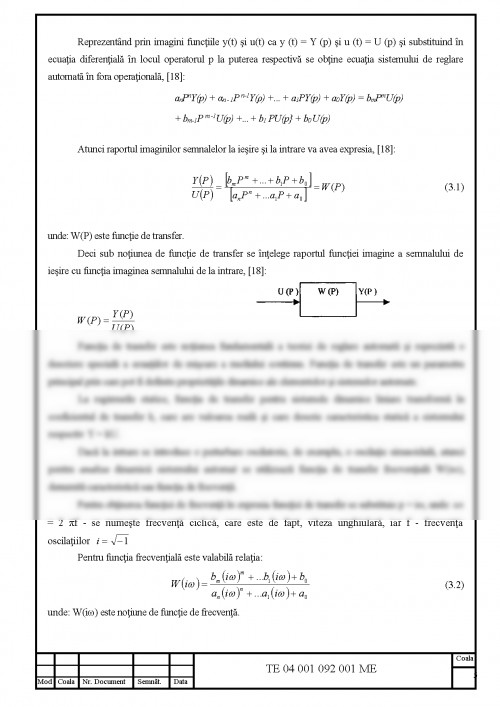
3) Elementul integrator
Este descris de o ecuatie diferentiala de ordinul 1
y = b0 u dupa care se poate defini elementul.
Deci se numeste element integrator acela in care viteza de variatie a marimii de iesire este proportionala cu marimea de intrare sau, ce este acelasi lucru, altfel exprimate marimea de iesire este proportionala cu integrala marimii intrare.
Ecuatia de legatura da:
unde b0 = k este coeficientul de amplificare al elementului
Elementul integrator in forma operationala va fi:
unde T1 = 1/b0 se numeste constanta de integrare si are dimensiunea timpului.
4) Elementul aperiodic (elementul de inertie de ordinul 1)
Este descris de o ecuatie diferentiala de ordinul unu de forma
dy / dt + a0 y = b0 u, unde a0 ?0, b0?0
Impartind ecuatia cu a0 se obtine
Tdy / dt + y = ku
Unde k = b0/ a0 este coeficientul de amplificare; T = 1/a0 este constanta de timp a elementului
Ecuatia caracteristica, adica ecuatia respectiva in forma operationala va fi:
T P Y(P) + Y(P) = kU (P)
Atunci
W(p) = Y (P)/ U(P) = k / (TP + 1) este functia de transfer
Raspunsul la frecventa are expresia:
5) Elementul derivativ
Este acela la care marimea de iesire y este proportionala cu viteza marimii de intrare:
Y = b0 du / dt, b0 ? 0
Daca in ecuatia de legatura, care descrie dinamica elementului, notam b0 = Td unde Td se numeste tipul derivativ , atunci avem:
Y
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.