PARTICULARITĂŢI ALE DEBAVURĂRII ROBOTIZATE
Importanţa automatizării procesului de debavurare: Pratt and Whitney (firmă producătoare de motoare pt. aviaţie) a estimat că 12% din timpii de prelucrare sunt ocupaţi cu operaţii de debavurare.
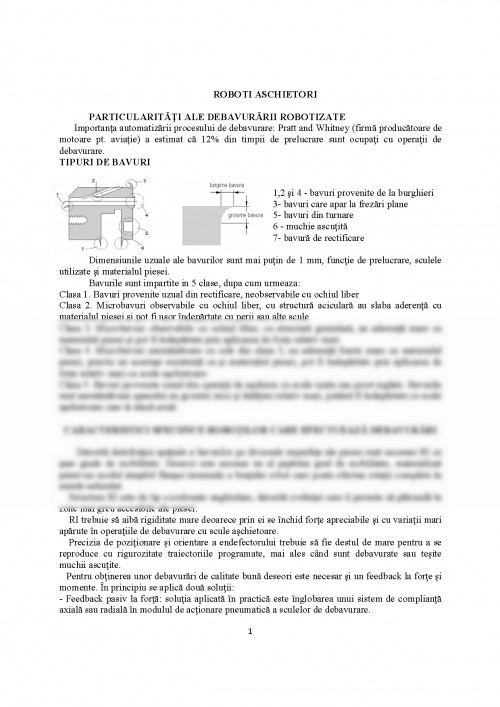
TIPURI DE BAVURI
1,2 şi 4 - bavuri provenite de la burghieri
3- bavuri care apar la frezări plane
5- bavuri din turnare
6 - muchie ascuţită
7- bavură de rectificare
Dimensiunile uzuale ale bavurilor sunt mai puţin de 1 mm, funcţie de prelucrare, sculele utilizate şi materialul piesei.
Bavurile sunt impartite in 5 clase, dupa cum urmeaza:
Clasa 1. Bavuri provenite uzual din rectificare, neobservabile cu ochiul liber
Clasa 2. Microbavuri observabile cu ochiul liber, cu structură aciculară au slaba aderenţă cu materialul piesei şi pot fi uşor îndepărtate cu perii sau alte scule
Clasa 3. Microbavuri observabile cu ochiul liber, cu structură granulară, au aderenţă mare cu materialul piesei şi pot fi îndepărtate prin aplicarea de forţe relativ mari
Clasa 4. Microbavuri asemănătoare cu cele din clasa 3, au aderenţă foarte mare cu materialul piesei, practic au aceeiaşi rezistenţă ca şi materialul piesei, pot fi îndepărtate prin aplicarea de forţe relativ mari cu scule aşchietoare.
Clasa 5. Bavuri provenite uzual din operaţii de aşchiere cu scule uzate sau prost reglate. Bavurile sunt asemănătoare şpanului au grosimi mici şi înălţimi relativ mari, putând fi îndepărtate cu scule aşchietoare care le atacă axial.
CARACTERISTICI SPECIFICE ROBOŢILOR CARE EFECTUEAZĂ DEBAVURĂRI
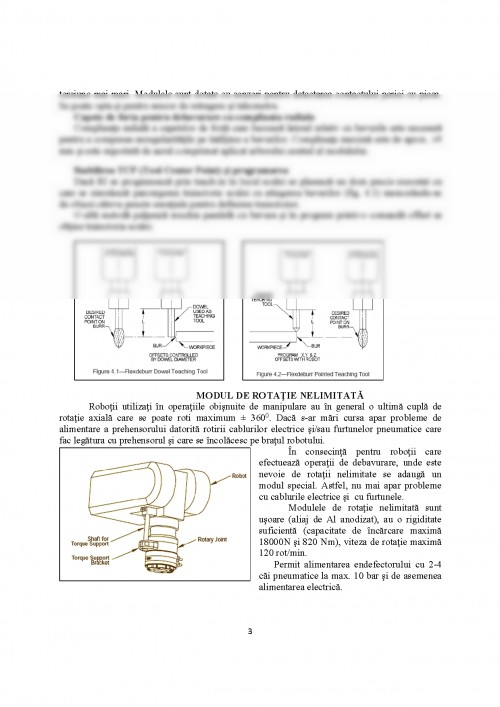
Datorită distribuţiei spaţiale a bavurilor pe diversele suprafeţe ale piesei sunt necesari RI cu şase grade de mobilitate. Deseori este necesar un al şaptelea grad de mobilitate, materializat printr-un modul ataşabil flanşei terminale a braţului robot care poate efectua rotaţii complete în număr nelimitat.
Structura RI este de tip coordonate unghiulare, datorită zvelteţei care îi permite să pătrundă în zone mai greu accesibile ale piesei.
RI trebuie să aibă rigiditate mare deoarece prin ei se închid forţe apreciabile şi cu variaţii mari apărute în operaţiile de debavurare cu scule aşchietoare.
Precizia de poziţionare şi orientare a endefectorului trebuie să fie destul de mare pentru a se reproduce cu rigurozitate traiectoriile programate, mai ales când sunt debavurate sau teşite muchii ascuţite.
Pentru obţinerea unor debavurări de calitate bună deseori este necesar şi un feedback la forţe şi momente. În principiu se aplică două soluţii:
- Feedback pasiv la forţă: soluţia aplicată în practică este înglobarea unui sistem de complianţă axială sau radială în modulul de acţionare pneumatică a sculelor de debavurare.
- Feedback activ la forţă, soluţia uzuală: se ataşează imediat sub modulul de acţionare a sculei un modul care să măsoare în timp real forţele dezvoltate în timpul procesului de îndepărtare de material.
SCULE ŞI ACCESORII PENTRU DEBAVURAREA ROBOTIZATĂ
Sculele uzuale utilizate pentru debavurări sunt freze deget cu diametru mic şi coadă cilindrică, pietre de rectificat şi perii cu fire metalice sau din nylon. Sculele care lucrează cu turaţii înalte sunt poziţionate şi orientate precis în modulele de acţionare prin intermediul unor bucşe elastice cu trei sau şase fălci.
Pentru debavurări robotizate se mai utilizează şi jeturi de apă cu presiune înaltă, de cele mai multe ori jetul este fix şi RO deplasează piesa supusă debavurării.
Pentru periile care lucrează cu turaţii mai mici decât frezele sau pietrele de rectificate se utilizează pentru prindere mandrine cu bacuri filetate.Mai rar se utilizează pile pentru debavurarea unor fante înguste.
ACŢIONAREA SCULELOR PENTRU DEBAVURARE
Sculele sunt mobile, purtate de către RI, sau sunt staţionare. Prima variantă se aplică în general când piesele au gabarit mare, iar cea de a doua pentru piese cu dimensiuni mici care pot fi şi apucate uşor de către robot.
În varianta sculelor purtate de către RI, sistemul de acţionare este sub forma unui modul montat direct sau indirect pe flanşa braţului robot. Cea mai utilizată soluţie pentru puteri mici şi medii este turbina pneumatică. Acesta are avantajul simplităţii, masă relativ mică şi turaţii ridicate necesare pentru sculele aşchietoare cu diametru mic.
Capete de forta cu actionare pneumatica
Capetele de forţă pentru operaţii aşchietoare sunt dotate cu complianţă radială sau axială. Primele sunt utilizare în general pentru debavurarea/teşirea muchiilor care sunt atacate lateral de către sculă, celelalte când scula lucrează axial.
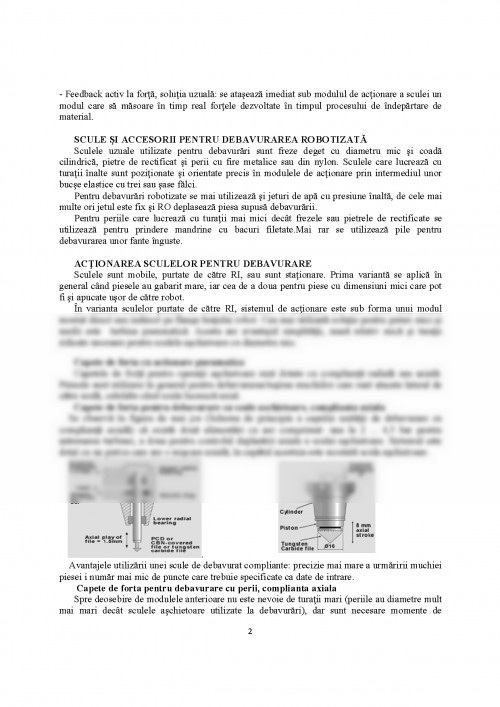
Capete de forta pentru debavurare cu scule aschietoare, complianta axiala
Se observă în figura de mai jos (Schema de principiu a capului unităţii de debavurare cu complianţă axială) că există două alimentări cu aer comprimat: una la 2 4,5 bar pentru antrenarea turbinei, a doua pentru controlul deplasării axiale a sculei aşchietoare. Sistemul este dotat cu un piston care are o mişcare axială, în capătul acestuia este montată scula aşchietoare.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.